
(本文素材源於專利WO2025221916)一種人形機器人,包括具有軀幹的上部區域、連接到軀幹的一對臂元件以及頭部和頸部元件。頭部和頸部元件包括連接到軀幹的頸部部分和連接到頸部部分的頭部部分。頭部部分具有頭部殼體元件,該元件具有限定頭部容積的第一殼體和第二殼體。第一殼體包括一個開口,該開口具有延伸跨過至少大部分開口的蓋板。第一攝影機和第二攝影機位於頭部容積內,每個攝影機都具有超過指定角度的水平和垂直視場。第一和第二攝影機機身之間的位置間隔小於15釐米。該機器人還包括下部區域,該下部區域具有連接到上部區域並與之隔開的一對腿。
技術領域
[0003] 本公開涉及機器人的感測器,具體而言涉及通用人形機器人的感測器。該通用人形機器人的感測器被配置為允許所述機器人實質性地模仿人類的運動、功能和能力。
背景技術
[0004] 美國當前的勞動力市場正面臨前所未有的勞動力短缺,其特徵是超過1000萬個未填補的職位。這些空缺職位中有很大一部分屬於被認為是不安全、不受歡迎或涉及危險工作環境的職業。 這種持續且不斷升級的可用勞動力短缺,這就產生了一個迫切的需求:開發和部署先進的機器人系統,使其能夠執行那些對人類工人來說缺乏吸引力或構成風險的任務。為了有效解決這一日益擴大的勞動力缺口,設計和製造能夠在以人為中心的順暢環境中高效且可靠地運行的機器人變得至關重要。這些環境通常要求具備諸如身體靈巧性、持續的耐力、精確的操作能力以及在專為人類設計的複雜空間中導航的能力。
[0005] 先進的通用人形機器人已成為應對這些挑戰的一個有前景的解決方案。這些機器人經過精心設計,以複製人類形態並模仿人類功能,通常具有雙足移動的兩條腿、具備雙臂的雙邊操作能力,以及一個便於與人類使用者互動的螢幕。這種擬人化設計使這些機器人能夠無縫融入最初為人類設計的環境,從而最大限度地減少對現有基礎設施進行廣泛改造的需求。隨著這些機器人致力於模仿人體,為其配備一系列旨在從環境中獲取資料的感測器元件變得至關重要。為了滿足這些要求,本公開引入了一種嵌入在機器人頭部、軀幹和腳部的創新感測器元件陣列。
發明摘要
[0006] 本公開的主題涉及一種人形機器人,包括一個上部區域,該區域包括:(i) 軀幹,(ii) 連接到軀幹的一對臂元件,以及 (iii) 頭部和頸部元件,包括連接到軀幹的頸部部分和連接到頸部部分的頭部部分。頭部部分具有一個頭部外殼元件,包括第一外殼和連接到第一外殼的第二外殼,以在第一外殼和第二外殼之間定義一個頭部容積,其中第一外殼包括其中形成的一個開口。一個覆蓋物延伸穿過第一外殼中形成的開口的至少大部分。該機器人包括一個第一攝影機,其範圍位於頭部容積內,並具有大於45度的第一水平視場和大於15度的第一垂直視場。第一攝影機包括:(i) 第一主體,和 (ii) 位於覆蓋物和第一攝影機主體之間的第一攝影機鏡頭。該機器人還包括位於頭部容積內的第二攝影機,其具有大於45度的第二水平視場和大於15度的第二垂直視場。第二攝影機包括:(i) 第二主體位於距離第一攝影機主體小於15釐米的位置,以及 (ii) 位於覆蓋物和第二攝影機主體之間的第二攝影機鏡頭。機器人還包括連接到上部區域並與上部區域間隔開的下部區域,下部區域包括一雙腿。
[0007] 本公開的主題涉及一種人形機器人,包括上部區域,該區域包括:(i) 軀幹,(ii) 連接到軀幹的一對臂元件,以及 (iii) 連接到軀幹並具有頸部部分和連接到頸部部分的頭部部分的頭部和頸部元件。頭部部分包括頭部外殼元件,該元件包括第一外殼和連接到第一外殼的第二外殼,以在第一外殼和第二外殼之間定義頭部容積。一個包含顯示器的電子元件位於第一外殼和第二外殼之間的頭部容積內。第一攝影機位於頭部容積內並位於顯示器上方。機器人還包括連接到上部區域並與上部區域間隔開的下部區域,下部區域包括一雙腿。
[0008] 本公開的主題涉及一種人形機器人,包括上部區域,該區域包括:(i) 軀幹,(ii) 連接到軀幹的一對臂元件,以及 (iii) 連接到軀幹並具有頸部部分和連接到頸部部分的頭部部分的頭部和頸部元件。頭部部分包括頭部外殼元件,該元件包括第一外殼和連接到第一外殼的第二外殼,以在第一外殼和第二外殼之間定義頭部容積。包含顯示器的電子元件位於頭部容積內的前殼和後殼之間。一個感測器凹槽 (sensor recess) 位於顯示器上方,並被配置為提供頭部部分相對於前殼的內嵌區域 (inset region)。電子元件還包括一個攝影機,該攝影機與感測器凹槽的一個範圍對齊。機器人還包括連接到上部區域並與上部區域間隔開的下部區域,下部區域包括一雙腿。
[0009] 本公開的主題涉及一種人形機器人,包括上部區域,該區域包括:(i) 軀幹,(ii) 連接到軀幹的一對臂元件,以及 (iii) 連接到軀幹並具有頸部部分和連接到頸部部分的頭部部分的頭部和頸部元件。頭部部分包括第一電子元件,該元件包括具有第一視線的第一攝影機;以及第二電子元件,該元件包括具有第二視線的第二攝影機,第二視線相對於第一視線成角度。機器人還包括連接到上部區域並與上部區域間隔開的下部區域,下部區域包括一雙腿。
[0010] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括頭部元件,該元件包括第一感測器元件和第二感測器元件,其中第一感測器元件包括位於螢幕上方並指向前方的多個上部攝影機,第二感測器元件包括位於螢幕下方並向下傾斜的多個下部攝影機。機器人包括連接到頭部元件的軀幹元件,軀幹元件包括位於腰部區域附近並指向前方的前部感測器元件,以及位於上背部區域並指向後方的後部感測器元件。第一感測器元件、第二感測器元件、前部感測器元件和後部感測器元件被配置為提供重疊的視場,以實現全面的環境感測。機器人包括一個處理器,配置為接收和處理來自感測器元件的資料,以促進人形機器人在其環境中的導航和互動。
[0011] 本公開的主題涉及一種操作人形機器人的方法。具體而言,該方法包括使用位於人形機器人頭部元件中螢幕上方的多個上部攝影機捕捉前向視覺資料。該方法包括使用位於頭部元件中螢幕下方的多個下部攝影機捕捉向下視覺資料。該方法包括使用位於人形機器人軀幹元件腰部區域附近的前部感測器元件捕捉前向地面水平視覺資料。該方法包括使用位於軀幹元件上背部區域的後部感測器元件捕捉後向視覺資料。該方法包括處理從上部攝影機、下部攝影機、前部感測器元件和後部感測器元件捕捉的視覺資料,以生成具有重疊視場的綜合環境地圖。該方法包括基於該綜合環境地圖控制人形機器人的運動和互動。
[0012] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括一個頭部元件,其中包括多個攝影機,排列成在機器人周圍水平提供至少270度的視場,其中該多個攝影機包括至少一個前向攝影機、一個左向攝影機和一個右向攝影機,以及一個位於前向攝影機下方的螢幕。該機器人包括一個連接到頭部元件的軀幹元件,連接到軀幹元件的一對臂元件,連接到軀幹元件的一對腿元件,以及一個配置為接收和處理來自多個攝影機的資料以促進人形機器人在其環境中導航和互動的處理器。
[0013] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括頭部元件,其中包括第一感測器元件,該元件包括至少三個水平排列的攝影機,位於頭部元件的上部區域並指向前方;第二感測器元件,包括至少三個水平排列的攝影機,位於頭部元件的下部區域並向下傾斜;以及位於第一和第二感測器元件之間的螢幕。機器人包括連接到頭部元件的軀幹元件,連接到軀幹元件的一對臂元件,連接到軀幹元件的一對腿元件,以及配置為接收和處理來自第一和第二感測器元件的資料以促進人形機器人在其環境中導航和互動的處理器。
[0014] 本公開的主題涉及一種用於人形機器人的感測器系統。具體而言,該系統包括頭部元件,其中包括第一感測器元件,該元件包括至少三個水平排列的攝影機,位於頭部元件的上部區域並指向前方;第二感測器元件,包括至少三個水平排列的攝影機,位於頭部元件的下部區域並向下傾斜;位於第一和第二感測器元件之間的螢幕,以及配置為適應頭部運動的可變形頸部護罩 (deformable neck shield)。該系統包括連接到頭部元件的軀幹元件,以及配置為接收和處理來自第一和第二感測器元件的資料以促進人形機器人導航和物體操作的處理器。
[0015] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括一個頭部元件,其中包括多個相機,這些相機的佈置旨在提供圍繞機器人水平方向的 360 度視場;其中,所述多個相機包括至少兩個前向相機、一個左向相機、一個右向相機和一個後向相機,以及一個位於前向相機下方的螢幕。該機器人還包括連接到頭部元件的軀幹元件、連接到軀幹元件的一對手臂元件、連接到軀幹元件的一對腿部元件,以及一個處理器,該處理器被配置用於接收和處理來自所述多個相機的資料,以輔助人形機器人的導航及其與環境的互動。
[0016] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括頭部元件,連接到頭部元件的軀幹元件,連接到軀幹元件的一對臂元件,連接到軀幹元件的一對腿元件,以及分佈在頭部元件、軀幹元件和腿元件上的多個感測器元件。該多個感測器元件包括至少一個位於頭部元件中的頭部感測器元件,至少一個位於軀幹元件中的軀幹感測器元件,以及至少一個位於每個腿元件中的腳部感測器元件。這些感測器元件被配置為提供重疊的視場,以實現全面的環境感測。機器人包括一個處理器,配置為接收和處理來自感測器元件的資料,以促進人形機器人的導航、互動和安全功能。
[0017] 本公開的主題涉及一種操作人形機器人的方法。具體而言,該方法包括使用分佈在人形機器人的頭部元件、軀幹元件和腿元件上的多個感測器元件捕捉視覺資料,其中多個感測器元件包括至少一個頭部感測器元件、至少一個軀幹感測器元件和每個腿元件中的至少一個腳部感測器元件。該方法包括處理捕捉到的視覺資料以生成具有重疊視場的綜合環境地圖。該方法包括基於環境地圖檢測潛在危險,包括障礙物、不平坦的表面和懸崖 (cliffs)。該方法包括基於檢測到的潛在危險控制人形機器人的運動和互動,以確保安全的導航和操作。
[0018] 本公開的主題涉及一種人形機器人。具體而言,該機器人包括頭部元件,連接到頭部元件的軀幹元件,連接到軀幹元件的一對臂元件,連接到軀幹元件的一對腿元件,以及分佈在頭部元件、軀幹元件和腿元件上的多個感測器元件。該多個感測器元件包括至少一個位於頭部元件中的頭部感測器元件,至少一個位於軀幹元件中的軀幹感測器元件,以及至少一個位於每個腿元件中的腳部感測器元件。這些感測器元件被配置為提供重疊的視場以實現全面的環境感測。機器人還包括一個處理器,配置為接收和處理來自感測器元件的資料,以促進人形機器人的導航、互動和安全功能。
[0019] 在一些實施例中,人形機器人包括一個戰略性地分佈在頭部、軀幹和腳部元件上的先進感測器元件,以實現全面的環境感知和動態導航能力。頭部感測器元件包括第一感測器元件,該元件由三個水平排列的上部攝影機組成,位於螢幕上方並指向前方以進行遠距離深度感知;以及第二感測器元件,該元件由兩個垂直間隔的下部攝影機組成,位於螢幕下方,向下傾斜以進行近距離深度感知。軀幹元件包括一個靠近腰部區域的前部感測器元件,具有一個 RGB 攝影機、一個 VCSEL(垂直腔面發射雷射器)投影儀、左和右紅外 (IR) 探測器和一個慣性測量單元 (IMU),指向前方;以及一個位於上背部區域的後部感測器元件,指向後方。此外,每個腳部感測器元件整合了一個飛行時間 (Time-of-flight) 攝影機、雷射接近感測器和漫反射接近感測器,以精準檢測安全邁步範圍內的空隙,從而增強機器人的穩定性和行走安全性。
[0020] 頭部元件通過包含配置為旋轉和傾斜運動的致動器 (actuators) 的頸部元件連接到軀幹,從而動態調整攝影機的視場。這些致動器使機器人能夠通過處理和融合視覺資料(包括立體深度感知和慣性測量資料)來生成並持續更新綜合的三維環境地圖,從而促進精確的碰撞檢測和規避。人形機器人採用配置好的演算法來識別潛在碰撞,生成多條替代運動路徑,根據預定義的安全和效率標準評估這些路徑,並執行最佳導航策略。頭部元件進一步包含一個由多層材料製成的可變形頸部護罩,具有用於內部元件的內部保護層、外部美觀且環保的保護層,以及在高應力區域嵌入的加強部分以提高耐用性。這種綜合的感測器和致動器佈置共同確保了強大的感知和敏捷的運動,使人形機器人能夠在不同的距離和地形複雜性中有效地檢測、導航並與其周圍環境互動。
附圖簡要說明
[0021] 附圖僅通過示例而非限制的方式描繪了一個或多個符合本教導的實施方案。在附圖中,相同的參考數字指代相同或相似的元件。
[0022] 圖1 是人形機器人第一實施例的透檢視,處於伸展、直立的站立姿勢,該機器人包括:(i) 上部部分,具有以下部件:(a) 具有上部頭部感測器元件和下部頭部感測器元件的頭部/頸部,(b) 具有前部軀幹感測器元件和後部軀幹感測器元件的軀幹,(c) 左肩和右肩,(d) 左上臂和右上臂元件,每個元件包括上肱骨 (upper humerus)、下肱骨、上前臂和下前臂,(e) 左手腕和右手腕,以及 (f) 左手和右手,(ii) 中央部分,具有以下部件:(a) 脊柱,(b) 骨盆,(c) 左髖和右髖,(d) 左大腿上部和右大腿上部,以及 (f) 左大腿下部和右大腿下部,以及 (iii) 下部部分,具有以下部件:(a) 左小腿和右小腿 (shins),(b) 左距骨和右距骨 (talus),以及 (c) 左腳和右腳;
[0023] 圖2 是圖1中機器人所包含的感測器元件陣列的透檢視;
[0024] 圖3 是圖2所示感測器陣列的俯檢視;
[0025] 圖4 是圖1中機器人上部部分所包含的感測器元件的側檢視;
[0026] 圖5 是圖4中感測器元件的主檢視;
[0027] 圖6 是圖1中機器人的頭部和頸部元件的主檢視;
[0028] 圖7 是圖6中頭部和頸部元件的側檢視,顯示了上部頭部感測器元件的垂直視場 (FoVV1) 和下部頭部感測器元件的垂直視場 (FoVV2);
[0029] 圖8 是圖6中頭部和頸部元件的俯檢視,顯示了上部頭部感測器元件的水平視場 (FoVH1);
[0030] 圖9 是圖6中頭部和頸部元件的爆炸檢視;
[0031] 圖10A 是圖6中頭部和頸部元件的透檢視,其中頭部外殼元件被移除以顯示其中包含的電子元件;
[0032] 圖10B 是圖10A中電子元件的主檢視;
[0033] 圖11 是圖6的頭部和頸部元件的電子元件中包含的上部頭部感測器元件和下部頭部感測器元件的透檢視;
[0034] 圖12 是圖1中軀幹和腰部的後透檢視,顯示了後部介面面板和後部感測器元件;
[0035] 圖13 是圖1中軀幹和腰部的前透檢視,顯示了前部介面面板和前部感測器元件;
[0036] 圖14A 是圖1中軀幹和腰部的主檢視;
[0037] 圖14B 是沿圖14A中線14B-14B擷取的軀幹和腰部的橫截面檢視;
[0038] 圖14C 是圖14B的前部介面面板和前部感測器元件的放大檢視;
[0039] 圖15 是圖1中軀幹和腰部的爆炸檢視,該爆炸檢視顯示了 (i) 電池,(ii) 計算單元 (compute),(iii) 配電單元,(iv) 包括骨架和蓋板的外殼,(v) 具有脊柱致動器的腰部,(vi) 臂致動器 (J1),(vii) 前部介面面板連同前部感測器元件,(viii) 後部介面面板連同後部感測器元件;
[0040] 圖16A 是前部和後部軀幹感測器元件的前透檢視;
[0041] 圖16B 是圖15所示的前部和後部軀幹感測器元件的後透檢視;
[0042] 圖17 是圖1的人形機器人在所述伸展、直立站立姿勢下的側檢視,其中顯示:(i) 上部頭部感測器元件的垂直視場 (FoVV1),(ii) 下部頭部感測器元件的垂直視場 (FoVV2),(iii) 前部軀幹感測器元件的垂直視場 (FoVV3),以及 (iv) 後部軀幹感測器元件的垂直視場 (FoVV4);
[0043] 圖18 是圖17的人形機器人的側檢視及其相關聯的視場 FoVV1-FoVV4,其中機器人處於頭部向下姿態,即機器人的頭部圍繞頭部“是(yes)”(點頭)致動器軸向下移動;
[0044] 圖19是圖17所示人形機器人的側檢視及其相關視場 FoVv1–FoVv4,其中機器人處於低頭且軀幹前傾的姿態,即機器人頭部圍繞頭部“點頭”執行器軸向下轉動,機器人上半身圍繞髖部俯仰軸向下彎曲。
[0045] 圖20 是圖17的人形機器人的側檢視及其相關聯的視場 FoVV1-FoVV4,其中機器人處於頭部向上姿態,即機器人的頭部圍繞頭部“是(yes)”致動器軸向上移動;
[0046] 圖21 是圖17的人形機器人的側檢視及其相關聯的視場 FoVV1-FoVV4,其中機器人處於頭部向上且軀幹向後彎曲的姿態,即機器人的頭部圍繞頭部“是(yes)”致動器軸向上移動,且機器人的上部部分圍繞髖部俯仰軸向上移動;
[0047] 圖22 是圖1的人形機器人在所述伸展、直立站立姿勢下的俯檢視,其中顯示:(i) 上部頭部感測器元件 FoVH1)、下部頭部感測器元件 (FoVH2) 和前部軀幹感測器元件 (FoVH3) 的水平視場,以及 (ii) 後部軀幹感測器元件的水平視場 (FoVH4);
[0048] 圖23 是圖22的人形機器人的俯檢視及其相關聯的視場 FoVH1-FoVH4,其中機器人處於頭部向左轉動姿態,即機器人的頭部圍繞頭部“否(no)”(搖頭)致動器軸向左移動;
[0049] 圖24 是圖22的人形機器人的俯檢視及其相關聯的視場 FoVH1-FoVH4,其中機器人處於頭部向右轉動姿態,即機器人的頭部圍繞頭部“否(no)”致動器軸向右移動;
[0050] 圖25A 是圖17的機器人和感測器視場 (FoVs) 的側檢視,其中所述機器人站立在連續的支撐表面 (SS) 上;
[0051] 圖25B 是圖25A的機器人和感測器視場 (FoVs) 的側檢視,其中所述機器人正在接近一個可能以樓梯或懸崖形式存在的垂直落差;
[0052] 圖25C 是圖25B的機器人和感測器視場 (FoVs) 的側檢視,其中所述機器人正在接近一個與樓梯相鄰的垂直落差;
[0053] 圖25D 是圖25B的機器人和感測器視場 (FoVs) 的側檢視,其中所述機器人正在接近一個與懸崖相鄰的垂直落差;
[0054] 圖26 是人形機器人第二實施例的透檢視,處於伸展、直立的站立姿勢,該人形機器人包括前部頭部感測器元件、後部頭部感測器元件、前部軀幹感測器元件和後部軀幹感測器元件;
[0055] 圖27 是圖26中機器人的頭部和頸部元件的主檢視;
[0056] 圖28 是圖26中機器人的頭部和頸部元件的側檢視;
[0057] 圖29 是圖26中機器人的頭部和頸部元件的俯檢視,並顯示了前部頭部感測器元件中包含的三個攝影機的獨立感測器視場,以及後部頭部感測器元件的 FoV2;
[0058] 圖30 是圖26的人形機器人的側檢視,其中顯示:(i) 前部頭部感測器元件的垂直視場 (FoVV1) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態,(ii) 後部頭部感測器元件的垂直視場 (FoVV2) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態,(iii) 前部軀幹感測器元件的垂直視場 (FoVV3),以及 (iv) 後部軀幹感測器元件的垂直視場 (FoVV4);
[0059] 圖31 是圖26的人形機器人的俯檢視,其中顯示:(i) 前部頭部感測器元件的水平視場 (FoVH1) 在:(a) 直立姿態,(b) 頭部向左轉動姿態,(c) 頭部向右轉動姿態,(ii) 後部頭部感測器元件的水平視場 (FoVH2) 在:(a) 直立姿態,(b) 頭部向左轉動姿態,(c) 頭部向右轉動姿態,(iii) 前部軀幹感測器元件的水平視場 (FoVH3),以及 (iv) 後部軀幹感測器元件的水平視場 (FoVH4);
[0060] 圖32 是人形機器人第三實施例的透檢視,處於伸展、直立的站立姿勢,該人形機器人包括前部頭部感測器元件和後部軀幹感測器元件;
[0061] 圖33 是圖32中機器人的頭部和頸部元件的主檢視;
[0062] 圖34 是圖32中機器人的頭部和頸部元件的側檢視,顯示了在直立姿態下頭部感測器元件的垂直視場 (FoVVF);
[0063] 圖35 是圖32中機器人的頭部和頸部元件的俯檢視,並顯示了前部頭部感測器元件中包含的三個攝影機的獨立感測器視場;
[0064] 圖36 是圖32的人形機器人的側檢視,其中顯示:(i) 頭部感測器元件的垂直視場 (FoVVF) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態,(ii) 後部軀幹感測器元件的垂直視場 (FoVVR);
[0065] 圖 37 是圖 32 所示人形機器人的俯檢視,其顯示了:(i) 頭部前向感測器元件的水平視場 (FoVHF),分別處於:(a) 直立姿態,(b) 頭部左轉姿態,(c) 頭部右轉姿態;(ii) 軀幹後向感測器元件的水平視場 (FoVHR);
[0066] 圖38 是人形機器人第四實施例的透檢視,處於伸展、直立的站立姿勢,該人形機器人包括上部頭部感測器元件和下部頭部感測器元件;
[0067] 圖39 是圖38中機器人的頭部和頸部元件的主檢視;
[0068] 圖40 是圖39中頭部和頸部元件的側檢視,並顯示了上部和下部頭部感測器元件視場的垂直範圍;
[0069] 圖41 是圖39中頭部和頸部元件的俯檢視,並顯示了上部和下部感測器元件的水平視場;
[0070] 圖42 是圖38的人形機器人在所述伸展、直立站立姿勢下的側檢視,其中顯示:(i) 上部頭部感測器元件的垂直視場 (FoVV1),(ii) 下部頭部感測器元件的垂直視場 (FoVV2);
[0071] 圖43 是圖38的人形機器人在所述伸展、直立站立姿勢下的俯檢視,其中顯示:(i) 上部頭部感測器元件的水平視場 (FoVH1),(ii) 下部頭部感測器元件的水平視場 (FoVH2);
[0072] 圖44 是人形機器人第五實施例的透檢視,處於直立站立姿勢,其中所述人形機器人包括前部頭部感測器元件、左側頭部感測器元件和右側頭部感測器元件;
[0073] 圖45 是圖44中頭部和頸部元件的主檢視;
[0074] 圖46 是圖45中頭部和頸部元件的側檢視,並顯示了前部和頭部感測器元件的垂直視場 FoVVF;
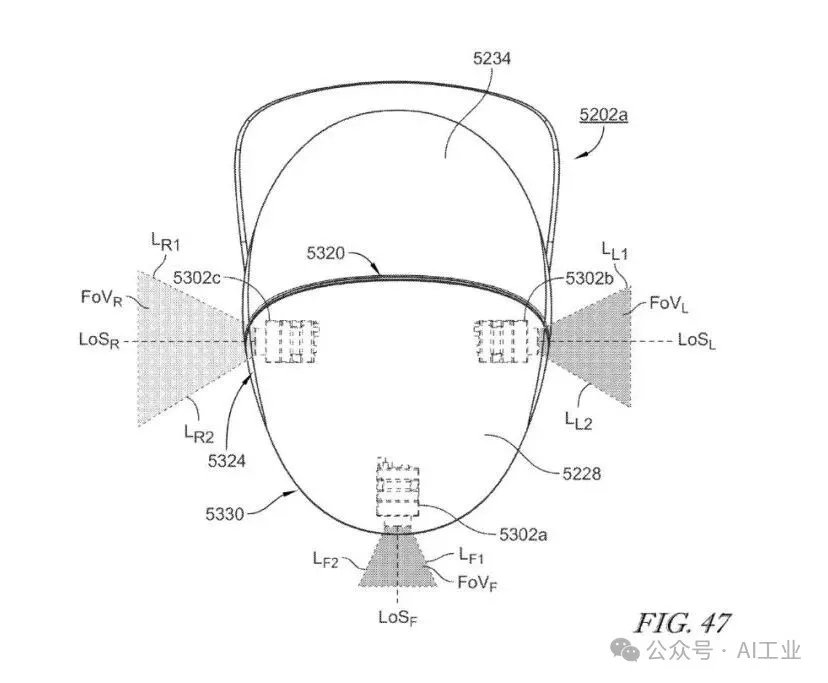
[0075] 圖47 是圖45中頭部和頸部元件的俯檢視,並顯示了頭部感測器元件的水平視場 FoVHF、FoVHL、FoVHR;
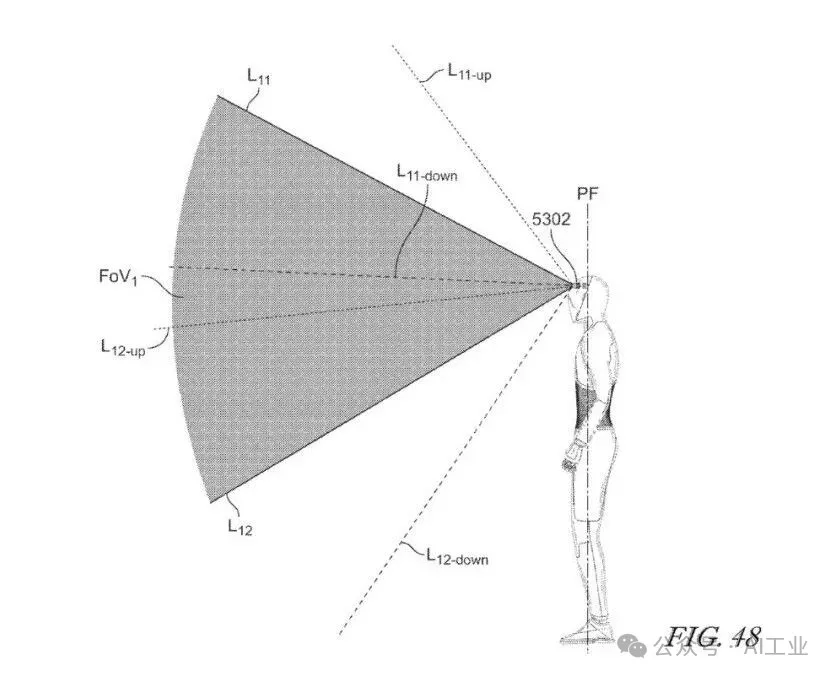
[0076] 圖48 是圖44的人形機器人的側檢視,其中顯示:(i) 前部頭部感測器元件的垂直視場 (FoVV1) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態;
[0077] 圖49是圖44所示人形機器人的俯檢視,其中顯示了:(i) 頭部前向感測器元件的水平視場 (FoVHF),分別處於:(a) 直立姿態、(b) 頭部左轉姿態、(c) 頭部右轉姿態;(ii) 頭部左側感測器元件的水平視場 (FoVHL),分別處於:(a) 直立姿態、(b) 頭部左轉姿態、(c) 頭部右轉姿態;以及 (iii) 頭部右側感測器元件的水平視場 (FoVHR),分別處於:(a) 直立姿態、(b) 頭部左轉姿態、(c) 頭部右轉姿態;
[0078] 圖50 是人形機器人第六實施例的透檢視,處於直立站立姿勢,其中所述人形機器人包括前部頭部感測器元件、後部頭部感測器元件、左側頭部感測器元件和右側頭部感測器元件;
[0079] 圖51 是圖50中機器人的頭部和頸部元件的主檢視;
[0080] 圖52 是圖51中機器人的頭部和頸部元件的側檢視,並顯示了前部和後部頭部感測器元件以及左側感測器元件中包含的三個攝影機的視場;
[0081] 圖53 是圖51中頭部和頸部元件的俯檢視,並顯示了包括兩個前部感測器元件以及左側、右側和後部感測器元件在內的感測器元件的水平視場;
[0082] 圖54 是圖50的人形機器人的側檢視,其中顯示:(i) 前部頭部感測器元件視場的垂直範圍 (FoVFL, FoVFR) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態,(ii) 後部頭部感測器元件的垂直視場 (FoVVR) 在:(a) 直立姿態,(b) 頭部向下姿態,(c) 頭部向上姿態;
[0083] 圖55A 是圖50的人形機器人的俯檢視,其中顯示:(i) 前部頭部感測器元件的水平視場 (FoVHA) 在:(a) 直立姿態,(b) 頭部向左轉動姿態,(c) 頭部向右轉動姿態,(ii) 左側頭部感測器元件的水平視場 (FoVHB) 在:(a) 直立姿態,(b) 頭部向左轉動姿態,(c) 頭部向右轉動姿態,和 (iii) 後部頭部感測器元件的水平視場 (FoVHE) 在:(a) 直立姿態,(b) 頭部向左轉動姿態;和
[0084] 圖55B 是圖50的人形機器人的俯檢視,其中顯示:(i) 左側頭部感測器元件的水平視場 (FoVHC) 在:(a) 直立姿態,(b) 頭部向左轉動姿態,(c) 頭部向右轉動姿態,(ii) 右側頭部感測器元件的水平視場 (FoVHD) 在:(a) 直立姿態,(b) 頭部向左轉動姿態。
詳細說明
[0085] 在以下的詳細說明中,列出了許多具體細節作為示例,以便提供對相關教導的透徹理解。然而,對於本領域技術人員而言,顯而易見的是,可以在沒有這些具體細節的情況下實施本教導。在其他情況下,為了避免不必要地模糊本公開的各個方面,對眾所周知的方法、程序、元件和/或電路進行了相對高層次的描述,而沒有詳細說明。
[0086] 雖然本公開包括多種不同形式的實施例,但在附圖中展示並在本文中詳細描述了若干實施例,並理解本公開應被視為所公開方法和系統原理的例證,並不旨在將所公開概念的廣泛方面限制於所示出的實施例。正如將要意識到的,所公開的方法和系統能夠具有其他和不同的配置,且若干細節能夠在不脫離所公開的方法和系統的範圍的情況下進行修改。例如,以下一個或多個實施例,部分或全部地,可以與所公開的方法和系統相一致地組合。因此,流程圖中的一個或多個步驟或圖中的元件可以被選擇性地省略和/或與所公開的方法和系統相一致地組合。此外,流程圖中的一個或多個步驟或組裝肩部和上臂的方法可以以不同的順序執行。因此,附圖、流程圖和詳細說明應被視為本質上是說明性的,而非限制性或限定性的。
[0087] 雖然圖1-25展示了人形機器人中先進感測器元件陣列的第一實施例,圖26-55展示了五個可與圖1所示人形機器人第一實施例互換使用的替代性先進感測器元件陣列。每個替代實施例具有略微不同的結構和配置,但每個實施例都包括相似的感測器,旨在獲取關於人形機器人周圍環境的資料。如下所述,每個實施例的特徵和/或元件可以互換、加入,或從其他實施例的特徵和/或元件中移除。例如,第一實施例下巴中包含的下部攝影機304a, 304b可以像第四、第五和第六實施例中移除下部凹槽那樣被移除。此外,利用頸部元件中的可變形材料并包括頸部元件中的致動器以允許頭部移動,可以被加入到第五實施例的頭部和頸部元件中。應當理解,這些僅僅是示例,任何特徵和/或元件都可以從本文公開的任何其他實施例中互換、加入或移除。
A. 介紹
[0088] 儘管機器人使用的感測器取得了進步,但傳統的機器人系統在感測器覆蓋範圍和效率方面往往面臨侷限性。例如,在感測器放置方面經常存在挑戰,特別是當機器人結構的一部分(如手臂或腿)可能會遮擋感測器的視場 (FoV) 時。傳統的感測器放置可能需要機器人進行廣泛的機動動作來收集必要的資料,這可能是低效的,並可能限制機器人有效執行任務的能力。此外,傳統機器人可能缺乏在不進行大幅移動或處理無關資料的情況下,既能監控其攜帶物品又能監控其周圍環境的能力。
[0089] 本申請中公開的感測器被設計為機器人系統(可能是一個通用的人形機器人)內的元件。感測器可以耦合到機器人的各種元件,包括頭部、軀幹和腳部,以至少檢測關於機器人周圍環境的資訊。與傳統機器人不同,這些感測器具有簡化的佈置,可以檢測重要資訊,而無需持續處理無關資訊。雖然機器人可以包括用於各種目的的額外感測器(例如,元件的位置或相對位置),但本文詳細描述的是包含在頭部、軀幹和腳部用於感知機器人周圍環境的感測器元件。
[0090] 嵌入在人形機器人中的感測器元件可以是相同或不同類型的,包括攝影機、慣性測量單元 (IMU)、接近感測器等。在頭部和軀幹中結合多種類型的感測器,在精準性和魯棒性方面提供了顯著的優勢。這些感測器可以提供多樣化的資料流,從而增強機器人全面感知其環境的能力。通過策略性地將感測器放置在不同的位置,機器人可以實現重疊的視場,允許資料的交叉引用並提高可靠性。例如,頭部攝影機可能會捕捉到一個物體的視覺細節,而軀幹攝影機可以檢測到同一個物體,從而提供互補的視角。此外,交叉引用來自不同感測器的資料有助於建立一個更完整、更準確的環境理解,減少錯誤或遺漏細節的風險。這種冗餘性確保了如果一個感測器發生故障,其他感測器仍能有效地發揮作用,從而維持機器人的操作完整性。
[0091] 機器人的移動性還通過實現對感測限制的動態補償,提供了優於固定感測系統的優勢。轉頭、彎曲軀幹以及前後傾斜的能力允許機器人即時調整視場 (FoV)。這樣的運動使機器人能夠感知可能在其感測器初始視場之外的額外空間資訊。例如,如果一個物體被部分遮擋在初始視場之外,機器人 1 可以通過傾斜頭部或彎曲軀幹來重新定位自己,將該物體帶入視野。這種視場的動態調整通過在不同感測器之間建立重疊的視場,進一步增強了感測的多樣性。例如,當機器人 1 向前傾斜時,前額感測器的視場可能與軀幹感測器的視場重疊,從而能夠交叉引用資料以提高精準性。這種動態重新定位感測器並使其視場重疊的能力確保了感測的魯棒性,因為冗餘允許系統補償潛在的感測器故障或不精準。例如,如果一個攝影機發生故障,來自其他感測器的重疊資料仍然可以提供關於環境的可靠資訊。此外,這種方法使機器人能夠適應變化的場景,例如通過主動調整其視場來收集必要資料,從而在雜亂的空間中導航或檢查不同高度的物體。
[0092] 在第一實施例中,所公開的感測器可以整合在機器人頭部 10 中,其整體形狀大致類似於人類頭部。因此,該頭部不包括大的平坦表面(例如,頭部的相對兩側,或者形狀不是:(a) 立方體,(b) 六棱柱,或 (c) 五棱柱)。相反,機器人頭部 10 幾乎所有的表面都是曲線的或具有曲線特徵。然而,如附圖所示,頭部確實包括一個帶有小的平坦感測器蓋或透鏡的凹槽。平坦的感測器蓋或透鏡嵌入在頭部的頂部部分,旨在減少如果感測器訊號需要穿過曲線蓋、護罩或透鏡時可能引起的感測器訊號失真。此外,雖然整體頭部形狀設計為類人狀,但所公開的頭部缺乏人類的面部結構(面頰、眼窩或其他移動結構)。
[0093] 與傳統的機器人頭部不同,本公開的頭部包括兩個彼此獨立的感測器元件。第一或上部感測器元件佈置在機器人1的前額區域,而第二或下部感測器元件佈置在機器人1的下巴區域。第一感測器元件的位置:(i) 使得能夠在頭部內部使用更大的螢幕,且 (ii) 使機器人1能夠看到放置在高處貨架上的料箱內部。相比之下,第二感測器元件則使機器人1在不使用第一感測器元件的情況下,也能夠看到其所搬運的物品(包括朝向料箱內部觀察)。與缺少第二感測器元件的傳統機器人相比,這是有利的,因為傳統機器人必須通過更多地彎曲並轉動頸部才能獲取由第二感測器元件捕獲的資料。此外,任一感測器元件都沒有佈置在人類眼睛通常所在的位置、頭頂部上方,或機器人1頭部的任一側。然而,機器人頭部10通過具有兩個自由度(DoF)的頸部與軀幹耦接,這使機器人1能夠輕鬆地通過向左或向右轉動頭部來掃描任一側。
[0094] 感測器可以整合在機器人軀幹元件 16 中,該元件在腰部、肩部和頭部/頸部之間延伸。軀幹被設計為:(i) 為機器人 1 提供大致的人形形狀,(ii) 為手臂元件和頭部/頸部提供結構和操作支撐,以及 (iii) 容納並保護手臂執行器和電子元件(例如,包括電池、計算裝置、配電元件、感測器等)。與傳統的機器人軀幹不同,所公開的軀幹包括兩個獨立的感測器元件。第一感測器元件位於機器人 1 的腰部區域內,而第二感測器元件位於機器人 1 的上背部區域內。第一感測器元件的位置:(i) 使機器人 1 能夠看到機器人前方包括腳部在內的前方地面檢視,(ii) 使機器人 1 能夠感測行進預測路徑中的障礙物、阻礙或不平坦的地面表面,以及 (iii) 允許機器人 1 根據感測到的環境修改動作。第二感測器元件:(i) 提供頭部感測器未捕獲的後方檢視,(ii) 允許機器人 1 在向後方移動之前感測障礙物或阻礙,(iii) 允許機器人 1 查看從後方接近的物體。
[0095] 在機器人 1 的軀幹 16 的上背部包含一個感測器元件,解決了頭部感測器缺乏後向感測的侷限性。為了在沒有後向感測器的情況下實現全面的後向感測,機器人 1 必須轉動其身體,特別是繞其脊柱 Z 軸旋轉,因為轉動頭部僅提供側檢視,並不能有效地解決後方視野問題。上背部的第二感測器元件允許機器人 1 檢測其身後的物體或運動,而無需旋轉軀幹,從而擴大了其視場並提高了態勢感知能力。與頭戴式感測器可能因頻繁的頭部運動而導致位置動態變化不同,上背部的固定感測器提供了一個穩定且一致的參考點。這種固定放置簡化了校準並確保可靠的資料收集,減少了與感測器未對準相關的錯誤可能性。此外,這種設計增強了機器人 1 在後向感知更為重要的環境(如家庭或醫療設施)中安全導航和互動的能力。
[0096] 這種使用前向和後向感測器並結合頭部運動來實現 360 度水平視場 (FoV) 的設計,通過避免需要專用的側面感測器來獲取機器人任一側的感測資料,從而優於傳統機器人。這減少了感測器和零件的數量,並降低了生產成本,使設計更加經濟。更少的感測器也減少了整體重量和能源消耗,這對於依靠電池供電運行的移動機器人是有益的。此外,兩個軀幹感測器元件都位於軀幹 16 中,在機器人 1 的頭部 10 下方,擴展了機器人 1 的垂直視場 (FoV) 並提供了不同的視角。
[0097] 人形機器人 1 中可以整合更多樣化和冗餘的感測器,以進一步增強安全性、提高可靠性並防止共因故障 (CCF)。例如,機器人可以利用飛行時間 (TOF) 攝影機、前視紅外 (FLIR) 攝影機、雷射接近感測器和漫反射接近感測器的組合。這些感測器可以策略性地放置在機器人 1 的腳部 92 上,以檢測懸崖和空隙,確保安全導航並防止跌落。機器人 1 還可以關聯來自不同感測器類型的資料,以提高檢測精度並降低故障風險。
[0098] 與第一實施例不同,第二實施例包括一個位於機器人 2001 的頭部部分 2010 內的後部感測器元件。這個額外的感測器允許機器人 2001 以最小的能量消耗獲取有關機器人 2001 後方周圍環境的更多資訊。此外,與第一或第二實施例的後部軀幹感測器相比,將後部頭部感測器的視場定位在所需位置可能更容易。此外,第二實施例省略了位於機器人 2001 頭部部分 2010 下巴區域的第二感測器元件。在機器人 2001 可以依賴上部感測器元件的應用中,省略所述第二感測器元件可能是可取的,因為省略所述第二感測器元件將使機器人 2001 能夠收集更少需要處理和分析的資料。
[0099] 與前兩個實施例不同,第三實施例省略了下部前方軀幹感測器元件。在某些應用中,省略該感測器元件可能是可取的,在這些應用中機器人3001 不需要持續觀察可能被物體(例如手提袋、金屬板等)遮擋的地面,而機器人 3001 正在搬運該物體。如果沒有這個額外的感測器元件,機器人 3001 可能嚴重依賴位於其頭部內的上部感測器,這反過來可能會由於機器人 3001 頭部 3010 為了獲得機器人 3001 環境的精準圖像而不斷運動,從而增加機器人 3001 的能源使用。儘管如此,這種由頸部運動引起的能量增加可能在總體上更加節能,因為減少了與收集、處理和分析前兩個實施例中包含的其他感測器元件的資料相關的能源消耗。
[0100] 與前三個實施例不同,第四實施例包括一個固定的頭部部分。換句話說,第四實施例缺乏一個包含至少一個、最好是兩個自由度的頸部。固定機器人 4001 的頭部部分 4010 簡化了校準,但要求機器人 4001 移動其軀幹 4016 來改變視場,而這本可以通過簡單地移動機器人 4001 的頭部 4010 來捕獲。此外,與前三個實施例不同,第四實施例缺乏後部感測器元件。這在某些工業環境中可能是有益的,因為機器人工作的環境是結構化的,並且可能沒有任何物體、物品或東西位於機器人 4001 的後面。
[0101] 與前四個實施例不同,第五實施例包括位於機器人 5001 的頭部 5010 內的感測器元件。這些額外的感測器元件將幫助機器人 5001 檢測可能從側面接近機器人 5001 的物體和/或人。這種設計對於旨在工作於相比其他機器人實施例配置的工作環境而言結構化程度較低的環境中的機器人可能是有益的。然而,如上所述,從這些額外的感測器元件捕獲的額外資料可能會不必要地增加機器人 5001 的整體能源使用。然而,為了潛在地抵消額外資料的收集,該實施例放棄在其軀幹內包含感測器元件。
[0102] 最後,第六實施例包括一種新的感測器元件組合,這些感測器元件被設計為協同工作,用於採集圍繞機器人6001周向360°範圍內的資料。雖然這種360度感測器陣列在獲取非結構化環境中的資料時可能極其有利,但它缺少佈置在軀幹內部的感測器元件。在某些環境中,當機器人6001處於低頭姿態且需要瞭解其身後有什麼時,缺少軀幹感測器元件可能是不利的。
[0103] 如上所述,每種配置都可能具有顯著的優點或缺點,這使得所述實施例更適合特定的操作環境。除了上述實施例之外,本申請還設想組合、修改、改變和/或變更每一個實施例,以建構一個最佳化的通用人形機器人,使其非常適合在其預期的環境中使用。此外,應當理解,可以建立一個包含上述所有感測器元件的實施例,並且它可以根據其配置(例如,基於使用者的購買選擇、月度訂閱選擇、和/或設計師基於操作環境的配置)選擇性地使用所述感測器元件。換句話說,機器人可能具有根據使用者和/或設計師的選擇對某些感測器元件進行軟體鎖定或解鎖的能力。在進一步的實施例中,機器人1可以包括所述感測器元件的任何組合。
B. 機器人架構
[0104] 圖1是根據第一實施例展示處於伸展、直立站立姿勢的人形機器人1的透檢視的圖表。如圖1所示,人形機器人1可以包括以下系統、元件、部件和/或零件:(i) 上部區域2,包括頭/頸10、軀幹16、左臂和右臂5、以及左手和右手56;(ii) 中部區域3,包括脊柱60、骨盆64、左和右上腿元件,每個上腿包括髖部70、大腿上部76、大腿下部80;以及 (iii) 下部區域4,包括左和右下腿元件,每個下腿包括脛部84和距骨88,以及腳92。每個手臂5包括肩部26、肱骨上部30、肱骨下部36、前臂上部40、前臂下部46和手腕50。每條腿6包括髖部70、大腿上部76、大腿下部80、脛部84和距骨88。這些部件為機器人1提供了人形形狀,并包含各種協同工作的致動器,以使所述機器人1能夠執行傳統機器人無法實現的類人運動。機器人1可以具有類似於人類的運動範圍,以便在以人類為中心的環境中操作。關於所述機器人1及其元件的運動範圍的更多資訊在PCT/US2025/16930和PCT/US2025/019793中公開,這兩份檔案全文以引用的方式併入本文。
[0105] 軀幹16在脊柱60、肩部26和頭/頸10之間延伸。軀幹16包括一個軀幹外殼162,該外殼大致包圍著電子元件200和手臂致動器(J1) 190。正如將要更詳細描述的那樣,軀幹外殼162包括前骨架164、後骨架166、後介面面板176和外殼元件172。軀幹16被設計用於 (i) 為機器人1提供大體上的人形形狀,(ii) 為手臂元件5和頭/頸10提供結構和操作支撐,以及 (iii) 容納和保護手臂致動器(J1) 190和電子元件200。軀幹16的前骨架164配置有結構支撐和負載路徑,以傳遞來自與容納在軀幹16中的手臂致動器(J1) 190相連的手臂5的扭矩。頭和頸10包括感測器元件和其他電子器件,這些器件與容納在軀幹16中的電子元件200通訊耦合。此外,其他感測器,包括致動器編碼器、扭矩感測器、壓力感測器等,也與電子元件200通訊耦合。
[0106] 脊柱60包括腰部604和軀幹扭轉致動器(J10) 620。腰部604配置用於容納軀幹扭轉致動器(J10) 620,並將機器人1的軀幹16和上部連接到骨盆64和腿部6。腰部604包括:(i) 腰部主體604.2,(ii) 穿孔通風板604.4,以及 (iii) 電池支撐支架604.6。腰部604經過成形和輪廓設計,以將機器人1的形態從軀幹16過渡到骨盆64。與傳統機器人不同,軀幹扭轉致動器(J10) 620並非位於機器人1軀幹16的正下方中心。相反,軀幹扭轉致動器(J10) 620向所述軀幹16的最前端偏移。這有助於定位並將軀幹的質心集中在腿部6之上,這有助於增加機器人1的穩定性和平衡,從而模仿人類的運動。容納在骨盆64和髖部70中的額外致動器與軀幹扭轉致動器(J10) 620配合,為軀幹16提供俯仰、橫滾和偏航運動。應當理解,在其他實施例中,這些系統、元件、部件和/或零件中的一些可以被省略、組合,或被替代的系統、元件、部件和/或零件所取代。
C. 通用感測器元件
[0107] 如圖2-5、9-16所示,機器人1包括一個高級感測器元件陣列995。所述高級感測器元件陣列995可以包括任何已知的感測器技術、實際感測器、感測部件、感測器的部件,或感測器或其技術的某個方面。具體而言,可能包含在感測器陣列中的所述感測技術元件995,包括:(i) 掃描相機,(ii) 單色相機,(iii) 彩色相機,(iv) CMOS相機,(v) CCD感測器或包含CCD感測器的相機,(vi) 具有捲簾快門或全域快門的相機或感測器,(vii) 其他類型的2D數字相機,(viii) 其他類型的3D數字相機,(ix) 能夠進行立體視覺、結構光、雷射三角測量的相機或感測器,(x) 聲納相機或超聲波相機,(xi) 紅外感測器和/或紅外相機,(xii) 雷達感測器,(xiii) 雷射雷達(LiDAR),(xiv) 其他結構光感測器、相機或技術,(xv) 點投影相機或感測器,或 (xvi) 上述任何組合或任何其他已知相機或感測器。
[0108] 高級感測器元件陣列995可以包括或排除:(i) 光學和成像元件(例如,透鏡、濾光片、紅外濾光片、光圈、快門(機械、電子、捲簾、全域、葉片式、焦平面)、彩色濾光陣列(例如,拜耳濾鏡)、分束器、光學窗口、偏振器、微透鏡陣列、保護蓋、光學對準機構、中性密度濾光片、漫射器、準直透鏡、菲涅爾透鏡、非球面透鏡、棱鏡元件、光管、抗反射塗層、光隔離器、光學編碼器、場透鏡、柱面透鏡),(ii) 圖像感測器和像素級元件(例如,圖像感測器、CCD感測器、CMOS感測器、像素陣列、光電二極體、背照式感測器(BSI)、全域快門感測器、捲簾快門感測器、單色感測器、彩色感測器、雪崩光電二極體(APD)、單光子雪崩二極體(SPAD)、光電門、量子點感測器、有機光電導膜(OPF)感測器、堆疊式感測器、曲面感測器、飛行時間(TOF)感測器、深度感測器、HDR感測器),(iii) 訊號調節和轉換(例如,訊號放大器、模數轉換器(ADC)、數模轉換器(DAC)、時序發生器、低通濾波器、高通濾波器、帶通濾波器、採樣保持電路、相關雙採樣(CDS)電路、可程式設計增益放大器(PGA)、電壓調節器、降噪電路、鉗位電路、黑電平校正單元、訊號復用器(mux)、解復用器(DEMUX)、鎖相環(PLL)),和/或 (iv) 處理和邏輯單元(例如,圖像處理器、FPGA(現場可程式設計門陣列)、dsp(數字訊號處理器)、深度引擎、內部時鐘、數字介面控製器、儲存模組、校準EEPROM、嵌入式微控製器、神經處理單元(NPU)、視覺處理單元(VPU)、即時作業系統(RTOS)、片上系統(SOC)、算術邏輯單元(ALU)、資料緩衝器、控制邏輯、時序控製器(TCON)、匯流排介面單元、高速緩衝儲存器、機器學習加速器)。
[0109] 此外,高級感測器元件陣列995可以包括或排除:(i) 照明和投影系統(例如,雷射發射器、紅外發射器、點投影儀、結構光投影儀、飛行時間發射器、光源(LED、雷射或VCSEL),其可以發射可見光或不可見光譜(包括940奈米)的光,可能符合IEC 62471:2006標準,可能具有大於紅外探測器(例如,相機)視場角(FoV)的照明場。此外,所述照明和投影系統可以使用1類或2類雷射,並可以投射任何圖案或數量的點,包括超過4500個或少於10,000個。此外,高級感測器元件陣列995可以包括或排除:(i) 照明控製器、閃光燈、環形燈、準直光源、頻閃燈、近紅外照明器、多波長投影儀、掃描雷射模組、擴束器、光束整形器、振鏡掃描器、投影透鏡元件、全息光投影儀、可調光源、強度調製器),(ii) 對焦、變焦和穩定機制(例如,對焦機制、變焦機制、自動對焦模組、手動對焦環、電動變焦致動器、光學校準模組、透鏡位置編碼器、焦距感測器、可變焦透鏡、圖像穩定模組、電子圖像穩定(EIS)、光學圖像穩定(OIS)、混合穩定系統、萬向節或穩定器、減震系統),(vii) 運動和方向感測(例如,IMU(慣性測量單元)、立體基線、基線對準機構、陀螺儀、加速度計、磁力計、傾斜感測器、指南針模組、運動跟蹤感測器、光流感測器、6自由度(6-DoF)感測器、9自由度(9-DoF)感測器、測斜儀、姿態估計單元、視覺里程計模組),(iii) 聲學和超聲波元件(例如,超聲波換能器、麥克風陣列、振動隔離架、壓電麥克風、駐極體電容麥克風、MEMS麥克風、超聲波接收器、超聲波發射器、聲透鏡、聲反射器、吸聲器、超聲波聚焦透鏡、聲耦合凝膠、飛行時間超聲波模組、聲訊號處理器、諧振腔、聲阻抗匹配器),(iv) 雷達和射頻(RF)元件(例如,GPS、雷達收發器、天線陣列、雷達訊號處理器、調頻連續波(FMCW)模組、脈衝雷達模組、單脈衝雷達單元、雷達前端模組、低噪聲放大器(LNA)、功率放大器(pa)、移相器、混頻器、本地振盪器、雙工器、波導、RF開關、RF濾波器、RF衰減器、定向耦合器、雷達校準模組),(v) 電源和熱管理(例如,電源供應模組、散熱器、冷卻風扇或熱電冷卻器),和/或 (vi) 環境和支援系統:環境感測器(例如,溫度、濕度、壓力、空氣質量、氣壓、環境光、紫外線(UV)、振動、聲級),安裝支架,外殼或機箱,防風雨外殼,減震器,乾燥劑包,隔熱層,通風格柵,EMI遮蔽,墊圈密封,防霧塗層,排水通道,環境控制單元。
[0110] 此外,感測器陣列995中包含的感測器可以採用百萬像素等級在0.5 MP到200 MP之間(例如,0.5, 0.8, 0.9, 1.3, 2.0, 2.1, 2.3, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 8.3, 10.0, 12.0, 13.0, 16.0, 18.0, 20.0, 24.0, 26.0, 30.0, 33.0, 36.0, 40.0, 42.0, 48.0, 50.0, 64.0, 100.0, 200.0)的幀,深度感測和/或相機的解析度在640x480和11648x8736之間(例如,640x480, 800x600, 1024x768, 1280x720, 1280x1024, 1366x768, 1600x900, 1920x1080, 2048x1080, 2560x1440, 2560x1600, 2880x1800, 3200x1800, 3840x2160, 4096x2160, 5120x2880, 6016x3384, 6144x3160, 6720x4480, 7680x4320, 8192x4320, 10240x4320, 11648x87360),可以以5.6 FPS到480 FPS(例如,12, 15, 23.976, 24, 25, 29.97, 30, 48, 50, 59.94, 60, 90, 120, 240, 480)錄製視訊,優選在10到120 FPS之間,最優選在20到90 FPS之間,和/或像素尺寸範圍可以從0.4 um到50 um。
[0111] 此外,如在下文中非常詳細討論的那樣,包含在感測器陣列995內的感測器302, 304, 208.2, 208.4, 932.2可能具有:(i) 在5度到160度之間,優選在30到80度之間,最優選在40到60度之間的垂直視場角FoV,以及 (ii) 在30度到180度之間,優選在50到120度之間,最優選在60到110度之間的水平視場角FoV。除了這些視場角之外,應當理解,本申請也設想了包含在上限和下限之間的任何數字。
[0112] 應當理解,任何軀幹感測器元件998都可以被使用并包含在機器人1的頭10內,且任何頭部感測器元件997都可以被使用或包含在機器人1的軀幹16內。換句話說,包含在機器人1任何部分內的任何感測器都可以包括任何已知或公開的感測器技術、實際感測器、感測部件、感測器的部件,或感測器或其技術的某個方面。此外,應當理解,額外的感測器可以被加入到感測器陣列995中,其中所述額外的感測器可以位於軀幹16的側面、軀幹16的上前方範圍(位於手臂致動器J1範圍的下方)、手臂元件內(例如,手腕或手掌),或任何其他位置。
D. 軀幹感測器元件
a. 軀幹殼體
[0113] 如圖12-15所示,軀幹殼體162包括前骨架164、後骨架166、後介面面板176和外殼元件172。因此,軀幹殼體162可具有包含後介面面板176和/或後骨架166的殼體164.2。前骨架164包括軀幹殼體或殼體164.2以及護頸(gorget)164.4。殼體164.2被設計用於承載軀幹16的大部分結構載荷。護頸164.4位於殼體164.2上並附接至其上,並將載荷從頸部和頭部10傳遞出去。在替代實施例中,殼體164.2和護頸164.4可以一體地形成為單個部件。或者,所述殼體164.2可由通過機械或化學手段彼此耦合的多個部件形成。
i. 前感測器面板
[0114] 此外,如前圖13-14所示,前骨架164,具體而言是殼體164.2,包括形成在骨架/殼體164、164.2下部範圍內的前感測器面板凹槽164.2.3。所述感測器面板凹槽164.2.3從骨架/殼體164、164.2的最下邊緣164.2a向上延伸,並被設計用於容納前感測器面板172.5。前感測器面板172.5包括外表面172.5a:(i) 具有被設計用於保護前感測器元件208.2的凹陷部分172.5.2,以及 (ii) 圍繞所述凹陷部分172.5.2並被設計為與軀幹16的外部範圍基本齊平的曲線部分172.5.4。應當理解,感測器面板172.5與骨架/殼體164、164.2是分離且獨特的,並被設計為耦合至其上。在其他實施例中,所述前感測器面板172.5可以與骨架/殼體164、164.2的一部分一體成型,從下邊緣向上移動到軀幹16的中部,移動到機器人1的側面,定位在軀幹16內包含的任何其他位置,或被省略。
[0115] 前部感測器面板172.5的凹陷部172.5.2由輪廓區域172.6.2的組合形成,該輪廓區域172.6.2由外側和向內傾斜的壁172.6.2.6、172.6.2.6、172.6.2.8構成,這些壁通過傾斜端壁172.6.2.2、172.6.2.4彼此連接。上述輪廓區域172.6.2的組合圍繞著前部感測器開口164.2.10.10佈置,其設計方式有助於確保它們不會干擾前部感測器元件208.2的視場。前部感測器元件208.2緊靠凹陷部172.5.2的內側區域佈置,並具有與前部感測器開口164.2.10.10的中心對齊的感測器中心。前部感測器面板172.5與前部感測器元件208.2之間的這種位置關係,使得前部感測器元件208.2被佈置在機器人1的內部範圍之內,更具體地說是在軀幹16內部,且更具體地位於殼體164.2內。此外,這種佈置還使前部感測器元件208.2相對於腰部外表面600a的相鄰部分呈凹入狀態。前部感測器元件208.2通過多個安裝件保持並固定在該位置。應當理解,在其他實施例中,前部感測器元件208.2也可以採用任意已知方式固定在軀幹16或腰部內,例如卡扣連接、過盈配合、一體成型等方式。
ii. 後感測器面板
[0116] 後骨架、後支架或後蓋166耦合到前骨架164,并包括用於剛度和剪下傳遞的結構特徵。後骨架166也被配置為重量較輕的蓋子,以保持後外殼170。在說明性實施例中,後骨架166包括至少一個孔徑或開放區域166.4.4.2,帶有背部支撐(back braces)166.4.4.4跨越該開放區域,以管理和傳遞來自殼體164.2的扭轉載荷,從一側圍繞到殼體164.2的另一側。因此,後介面面板、後面板或後部176被設計為配合在形成於後骨架166中的孔徑176.4之一內。在其他實施例中,後骨架166可以省略孔徑,後介面面板或後部176可以與後骨架、後支架或後蓋166一體成型或耦合至其上。
[0117] 後部介面面板、後面板或後部區域176被設計為與殼體164.2相連接,並且:(i) 為容納在軀幹16內的電子元件200提供一個外部介面;以及 (ii) 通過設定剛性支撐、將載荷傳遞到殼體164.2,從而加強結構特性。為便於後部介面面板、後面板或後部區域176與殼體164.2之間的連接,後面板176包括安裝延伸部176.2.2,該延伸部自後部內表面伸出,並與殼體164.2上的後面板安裝座164.2.6.8.8.6相配合。後部感測器面板176包括一個感測器區域176.4,其:(i) 具有用於保護後部感測器元件208.4的凹陷部176.6,以及 (ii) 具有環繞該凹陷部176.6的彎曲部分,並被設計為與軀幹16的外表面基本齊平。應當理解,後部區域176獨立於骨架/殼體164、164.2,是與其可拆卸連接的。 在其它實施例中,所述後部感測器面板176可以與骨架/殼體166、164.2的某一部分或電池組202一體成型,也可以下移至軀幹中部、上移至軀幹的上邊緣、佈置在軀幹內部的任何其它位置,或者整體省略。
[0118] 如圖12中最清楚所示,後感測器面板176的凹陷部分176.6由輪廓區域176.6.2的組合形成,該區域由頂部和底部成角度的壁176.6.2.2、176.6.2.4組成,這些壁通過成角度的端壁176.6.2.6、176.6.2.8彼此連接。所述輪廓區域176.6.2的組合圍繞著後感測器孔徑176.4.2,並且其設計方式有助於確保它們不會干擾感測器208.4的視野。後感測器元件208.4抵接凹陷部分176.6的內部範圍,并包括一個與後感測器孔徑176.4.2的中心對齊的感測器中心。後感測器面板176與後感測器元件208.4的這種位置關係使得所述後感測器元件208.4能夠定位在機器人1的一個範圍內,具體而言是在軀幹16內,更具體而言是在殼體164.2內。此外,所述定位使得後感測器元件208.4相較於軀幹16外表面的相鄰範圍是凹陷的。後感測器元件208.4通過多個安裝件176.2.4保持並固定在該位置。應當理解,在其他實施例中,後感測器元件208.4可以使用任何已知的方法固定在軀幹16內,包括一個或多個緊韌體——即螺紋、凸起、卡扣連接器、卡口安裝(bayonet mount)、銷孔連接(pin-and-hole connection)、壓配合/過盈配合(press-fit/interference fit)、夾具或卡夾機構、磁鐵、鉤環扣(魔術貼)、鉚釘、滾珠定位(ball detent)、鉸鏈關節、滑軌、凸輪鎖、肘節夾鉗(toggle clamps)、快拆銷、彈簧載入連接器、楔形鎖、定位銷、棘輪機構、T型槽連接器、旋鎖、插銷、鎖定片、一體成型、粘合劑等。
[0119] 後部介面面板176還可以包括一個或多個電源按鍵孔176.4.4、充電連接埠訪問區域176.10,以及用於訪問容納在軀幹16內的電子元件200的其他連接埠或介面。在示例性實施例中,第一和第二電源按鍵孔176.4.4.2、176.4.4.4可以容納與電源分配元件204和/或電子元件200的電池組202相連的電源按鍵;在替代實施例中,電源按鍵孔176.4.4也可以被省略。後部介面面板176還可以包括一個帶有充電連接埠開口176.10.4的連接埠訪問區域176.10,該區域還可以包括用於其它功能的開口176.10.6、176.10.8,例如與計算裝置206通訊連接的資料連接埠(如乙太網路連接埠206.6.2和/或USB連接埠206.6.4)。在示例性實施例中,連接埠訪問區域176.10包括一個凹陷表面176.10.4,該凹陷表面可由訪問門176.10.2覆蓋,訪問門176.10.2可以打開,以便將可拆卸的充電連接埠介面卡插入電池組202的充電連接埠202.2中。
iii. 外殼元件
[0120] 外殼元件172被配置為圍繞前骨架和後骨架164、166,並被設計為保護所述骨架164、166免受外部物體以及軀幹16與手臂元件5之間的意外接觸。外殼元件172包括:(i) 前外殼168,(ii) 後外殼170,(iii) 護罩或側面範圍172.2,以及 (iv) 能量衰減元件172.4。應當理解,外殼元件172可以被省略或由包括塑料或紡織品在內的任何已知材料製成。此外,外殼元件172可以被省略,且軀幹殼體162可以僅包括骨架和/或殼體部件。最後,關於軀幹16、其結構和/或元件的附加披露可能在全權併入此處以供參考的美國臨時申請63/766,911和美國專利申請19/066,122中討論。
b. 軀幹感測器元件
[0121] 如圖12-14所示及如上所述,軀幹16還包括前感測器元件208.2和後感測器元件208.4。前感測器元件208.2可以定位在腰部和軀幹16之間,同時它被配置為通過前感測器面板172.5中的前感測器開口164.2.10.10獲取資料,該開口至少部分被下軀幹或前感測器蓋172.8覆蓋。後感測器元件208.4可以定位在手臂致動器(J1)附近,同時它被配置為通過後感測器面板176中的後感測器孔徑176.4.2獲取資料,該孔徑至少部分被上軀幹或後感測器蓋176.8覆蓋。
[0122] 參見圖16,軀幹感測器元件208.2、208.4可以包括立體深度感測器208.3.2,該立體深度感測器208.3.2可以包括以下元件、方面、部件、功能和/或特徵:(i) 一個RGB相機208.3.2.2,其具有中部感測器透鏡208.3.2.2a、中部鏡頭殼體208.3.2.2b、中部遮光罩208.3.2.2c、中部相機機身208.3.2.2d、中部密封件208.3.2.2e以及中部遮罩部208.3.2.2f;(ii) 結構光投影器或紅外投影器(例如VCSEL投影器)208.3.2.4;(iii) 左側紅外探測器(例如左相機)208.3.2.6,其具有左側感測器透鏡208.3.2.6a、左側鏡頭殼體、左側遮光罩、左側相機機身、左側密封件以及左側遮罩部;(iv) 右側紅外探測器(例如右相機)208.3.2.8,其具有右側感測器透鏡208.3.2.8a、右側鏡頭殼體、右側遮光罩、右側相機機身、右側密封件以及右側遮罩部;(v) 處理器208.3.2.10;(vi) 三角測量器208.3.2.12;(vii) 散熱器208.3.2.14;(viii) 慣性測量單元(IMU)208.3.2.16;以及 (ix) 防護罩172.8、176.8。此外或可替代地,感測器元件208.2、208.4還可以具有美國專利9,494,415、9,835,773、9,992,474、10,007,994、10,154,246、10,310,362、10,586,394、10,656,511、10,924,638、11,736,677、11,321,876以及美國專利公開US2012/0218,464、US2016/0112,954、US2011/0188,028、US2020/0200,951和US2020/0322,594,或L. Keselman、J. Iselin Woodfill、A. Grunnet Jepsen等人在論文“Intel RealSense stereoscopic depth cameras”(刊於IEEE電腦視覺與模式識別會議研討會論文集,2017年,第1–10頁)以及其他Intel RealSense雷射雷達相機技術中所討論的任何其它特性、技術或功能,上述內容均以引用方式併入本文。
[0123] 在一個說明性實施例中,感測器208.3.2可以採用基於主動紅外立體視覺技術的立體深度感測,以精確測量場景中物體的距離。在操作期間,結構光投影儀或IR投影儀208.3.2.4被配置為向環境中發射結構化的紅外圖案。具體而言,IR投影儀208.3.2.4可以是垂直腔面發射雷射器(VCSEL)投影儀、LED基投影儀、邊緣發射雷射器和/或超輻射發光二極體。這種投射圖案:(i) 可以是偽隨機點陣、陣列、網格或其他結構化圖案變體(例如,線編碼圖案、隨機散斑圖案),並且 (ii) 可以作為一組密集的通過身份驗證特徵,以促進更精確的深度計算,特別是在環境光不足或表面紋理缺乏可區分特徵的場景中。
[0124] 感測器元件208.2、208.4包括兩個紅外探測器(IR探測器),具體而言是左IR探測器(例如,左攝影機)208.3.2.6和右IR探測器(例如,右攝影機)208.3.2.8。在其他實施例中,所述紅外探測器可以是基於InGaAs的感測器、基於微測輻射熱計的感測器、QWIP感測器、sCMOS感測器、基於MCT的感測器(碲鎘汞)、熱釋電感測器或其他IR成像模組。這兩個探測器208.3.2.6, 208.3.2.8 被一個已知的基線距離 WI 分隔開。因為檢測器 208.3.2.6, 208.3.2.8 中的每一個都從稍微不同的有利位置捕捉 IR 投影儀 208.3.2.4 的投影圖案,產生的圖像會表現出視差或差異——即左圖和右圖中對應圖案特徵位置的微小偏移。通過比較這兩張稍微偏移的圖像,感測器 208.3.2 通過立體三角測量演算法(例如,使用半全域匹配 (SGM)、塊匹配、基於動態規劃的方法或相位相關等方法)計算場景中每個像素或補丁的深度。當環境被主動投影的紅外圖案照明,而不是僅依賴自然存在的紋理或特徵時,這種三角測量過程變得更加穩健。因此,即使在低能見度條件下或在具有極小或均勻表面紋理的物體上,感測器 208.3.2 仍然可以可靠地檢測和匹配由結構光引入的高頻特徵。
[0125] 因此,這種主動 IR 立體方法極大地增強了在各種條件下的深度估計。在強環境光環境中,它用額外的一層結構化紅外細節補充了任何自然表面特徵。在極低光照環境中或在具有均勻表面的物體上,它提供了原本場景中會缺失的有用特徵。通過利用結構化 IR 圖案,感測器 208.3.2 從而能夠實現高精度的視差計算,最小化匹配歧義,並提供具有高空間解析度的穩健深度圖。此外,因為 IR 投影儀 208.3.2.4 在可見光譜之外工作,它不會干擾正常的視覺感知或傳統彩色成像。這確保了深度感測對人類操作員保持不顯眼,並且不會影響其他成像系統的性能。
[0126] 左感測器鏡頭 208.3.2.6a、右感測器鏡頭 208.3.2.8a 和中間感測器鏡頭 208.3.2.2a 被配置為將光聚焦到包含在相機主體 208.3.2.2d 內的成像器上。為了實現這一點,鏡頭可以具有任何已知的配置,包括具有基本平坦後壁的凸面配置,或在 US7,725,016、US9,869,847、US10,921,558、US11,347,030 和 US18/071,259 中描述的任何配置或特徵,這些專利中的每一項均通過引用全文併入本文。
[0127] 此外,鏡頭遮光罩 208.3.2.2c 和帶有其相關遮罩部分的遮罩 208.3.2.2f 被配置為吸收位於鏡頭附近的一定程度的光。因此,鏡頭遮光罩 208.3.2.2c 和帶有其相關遮罩部分的遮罩可以由任何吸光材料製成,包括在 US11,686,884 中描述的材料和設計,該專利通過引用全文併入本文。
[0128] IMU(慣性測量單元)208.3.2.16 在獲取資料時提供感測器 208.4 的空間位置。例如,如果腿部 6 保持靜止,機器人 1 的整體位置可能是靜止的;然而,軀幹 16 仍可能以兩個自由度定位,這將改變軀幹感測器元件 208.2, 208.4 的空間位置。IMU 208.3.2.16 可以與處理器 208.3.2.10 和/或計算裝置 206 進行資料通訊。這種位置資訊與圖像和深度資料相結合,為機器人 1 提供了穩健的態勢資訊。處理器 208.3.2.10 與位於人形機器人 1 軀幹 16 內的計算裝置 206 進行資料通訊。這些元件被緊湊地佈置以最佳化空間效率,其中散熱器 208.3.2.14 熱耦合到處理器 208.3.2.10,並被配置用於被動和主動散熱。散熱器 208.3.2.14 由環境冷卻和/或軀幹的內部通風系統冷卻,該系統可能包括強制風冷風扇、熱管或相變材料,以保持最佳工作溫度並確保內部電子裝置的長期可靠性。
[0129] 在替代實施例中,感測器元件 208.2, 208.4 可以利用飛行時間 (ToF) 感測器或基於 LiDAR(雷射雷達)的系統進行深度估計,具體取決於特定應用的要求,如範圍、解析度、功耗或環境適應性。此外,RGB 相機 208.3.2.2 可以被多光譜或高光譜感測器替代或增強,以增強材料分類、物體識別或其他能力。所述元件可以安裝在萬向平台或雲台元件上,以實現視場的動態重新定向。此外,處理器 208.3.2.10 和/或其他內部計算資源(例如,計算裝置 206)可以包含硬體加速(例如,GPU 或 FPGA)以支援圖像和深度資料的即時處理,用於導航、物體跟蹤、手勢識別和場景重建等應用。
i. 前軀幹感測器元件
[0130] 為了保護包含在前感測器元件 208.2 中的至少大部分感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8,所述前感測器元件 208.2 包括一個下軀幹感測器蓋 172.8,該蓋位於前感測器面板172.5 和所述感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8之間。因此,前感測器元件 208.2 的鏡頭 208.3.2.2a, 208.3.2.6a, 208.3.2.8a,具體地說是感測器 208.3.2.2, 208.3.2.4, 208.3.2.6 的鏡頭,位於感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d 和下軀幹感測器蓋 172.8 之間。為了確保感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d 與環境密封,下軀幹感測器蓋 172.8 延伸越過大部分(如果不是全部)前感測器開口 164.2.10.10。在其他實施例中,下軀幹感測器蓋 172.8 可以被省略,並且鏡頭 208.3.2.2, 208.3.2.6, 208.3.2.8 和潛在的感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8 可能會暴露在機器人 1 周圍的環境中。在另一實施例中,下軀幹感測器蓋 172.8 可以不延伸穿過前感測器開口 164.2.10.10 的整體。相反,所述下軀幹感測器蓋 172.8 可以覆蓋前感測器開口 164.2.10.10 的大部分,同時包括形成於其中的開口以接納鏡頭 208.2.2.2, 208.2.2.6, 208.2.2.8。
[0131] 下軀幹感測器蓋 172.8 可以由任何已知材料製成,並可以包括任何能夠通過所述下軀幹感測器蓋 172.8 進行資料收集的已知塗層。所述材料和塗層(例如,抗反射塗層、硬質塗層、抗靜電塗層、防霧塗層)包括但不限於鈉鈣玻璃、鋼化玻璃、硼矽酸鹽玻璃、鋁矽酸鹽玻璃、大猩猩玻璃、DragonTrail 玻璃、Schott 玻璃、熔融石英、石英玻璃、藍寶石玻璃、丙烯酸 (PMMA)、聚碳酸酯 (PC)、塑料薄膜、聚氨酯 (PU)、聚酯 (PET/PETG)、環烯烴共聚物 (COC/COP)、聚碸 (psu/pes)、聚醚酰亞胺 (PEI/ULTEM)、矽樹脂、氟聚合物 (ETFE/PFA/FEP)、氧化鋁、氧化鋯、氮化矽、氮化鋁、鋁環、不鏽鋼、鈦、抗反射 (AR) 塗層、硬質塗層、抗劃傷塗層、類金剛石碳 (DLC) 塗層、抗靜電 (ESD) 塗層、防霧塗層、疏水塗層、疏油塗層、防眩光塗層、紫外線阻隔塗層、IR 塗層/濾光片、帶通濾光片、中性密度 (ND) 濾光片、彩色塗層/濾光片、偏振塗層/薄膜、二向色塗層/濾光片、鏡面塗層、耐化學塗層、聚對二甲苯塗層、抗菌塗層、抗細菌塗層、導電塗層 (ITO)、EMI/RFI 遮蔽塗層,這些在美國專利申請號 16/896,016, 16/698,775, 16/417,311, 16/126,983, 15/359,317, 15/515,966 中描述,每一項均通過引用併入本文,以及任何其他類似材料或塗層,和/或其任何組合。此外,所述下軀幹感測器蓋 172.8 可以包括任何數量(例如,在 1 到 30 層之間)的上述材料、塗層和/或類似材料或塗層。所述下軀幹感測器蓋 172.8 可以是平面的、大致平面的和/或曲線的(例如,凸面或凹面),並且鏡頭 208.3.2.2, 208.3.2.6, 208.3.2.8 可以位於鄰近所述蓋 172.8 的位置,其中鏡頭 208.3.2.2, 208.3.2.6, 208.3.2.8 的外表面的一部分與下軀幹感測器蓋 172.8 的一部分平行。
[0132] 前感測器元件 208.2 可以具有模組化設計,以便於整合和維護,這與機器人 1 的整體設計理念相一致,即強調耐用性、適應性和易於服務。總體而言,至少大部分前感測器元件 208.2,包括感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8 及其相關鏡頭 208.3.2.2a, 208.3.2.6a, 208.3.2.8a,位於感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d(例如,相機主體)和下軀幹感測器蓋 172.8 之間。因此,大部分前感測器元件 208.2 完全包含在軀幹外殼 162 內,這有助於防止錯位並有助於與其他內部機器人結構保持穩定的位置關係。
ii. 後軀幹感測器元件
[0133] 後感測器元件 208.4 可以位於後支撐 164.2.2.4 處和/或連接到後介面面板 176 並被其覆蓋(圖 22)。類似於前感測器元件 208.2,後感測器元件 208.4 容納在軀幹內並定位成使其與穿過後介面面板 176 的後感測器孔徑 176.4.2 對齊。為了保護包含在後感測器元件 208.4 中的至少大部分感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8,所述後感測器元件 208.4 包括一個上軀幹感測器蓋 176.8,該蓋位於後感測器面板 176 和所述感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8 之間。因此,感測器元件 208.4 的鏡頭 208.3.2.2a, 208.3.2.6a, 208.3.2.8a,具體地說是感測器 208.3.2.2, 208.3.2.4, 208.3.2.6 的鏡頭,位於感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d 和上軀幹感測器蓋 176.8 之間。為了確保感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d 與環境密封,上軀幹感測器蓋 176.8 延伸越過大部分(如果不是全部)後感測器孔徑 176.4.2。在其他實施例中,上軀幹感測器蓋 176.8 可以被省略,並且鏡頭 208.2.2.2, 208.2.2.6, 208.2.2.8 以及潛在的感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8 可能會暴露在環境中,即環繞機器人 1。在進一步的實施例中,上軀幹感測器蓋 176.8 可能不延伸穿過後感測器孔徑 176.4.2 的整體。相反,所述上軀幹感測器蓋 176.8 可以覆蓋後感測器孔徑 176.4.2 的大部分,同時包括形成於其中的開口以接納鏡頭 208.2.2.2, 208.2.2.6, 208.2.2.8。
[0134] 下軀幹感測器蓋 172.8 可以由任何已知材料製成,並可以包括任何能夠通過所述下軀幹感測器蓋 172.8 進行資料收集的已知塗層。這些材料和塗層中的一些在上面已經討論過,並且同樣可以用於連接後感測器元件 208.4,因此,這裡將不再重複。後感測器元件 208.4 可以具有模組化設計,以便於整合和維護,這與機器人 1 的整體設計理念相一致,即強調耐用性、適應性和易於服務。總體而言,至少大部分後感測器元件 208.4,包括感測器 208.3.2.2, 208.3.2.4, 208.3.2.6, 208.3.2.8 及其相關鏡頭 208.3.2.2a, 208.3.2.6a, 208.3.2.8a,位於感測器主體 208.3.2.2d, 208.3.2.6d, 208.3.2.8d(例如,相機主體)和下軀幹感測器蓋 172.8 之間。因此,大部分後感測器元件 208.4 完全包含在軀幹外殼 162 內,這有助於防止錯位並有助於與其他內部機器人結構保持穩定的位置關係。
E. 頭部感測器元件
a. 頭部和頸部外殼
[0135] 如圖 1 和 6-11 所示,頭部和頸部元件 10 包括:(i) 頭部部分 202a,和 (ii) 耦合到頭部部分 202a 和軀幹 16 的頸部部分 202b。在其他零件、元件和區域中,頭部部分 202a 包括:(i) 外殼 234,包括:(a) 具有面罩 236.2 的前殼元件 236,(v) 後殼元件 238,(ii) 顯示器 330,(iii) 頭部感測器元件 997,(iv) 電子支架 240,和 (v) 其他電子裝置,可能包括揚聲器 240.1、麥克風 240.2、天線 240.3、照明元件 240.4 等。同時,頸部部分 202b 包括:(i) 上支架 242.1,(ii) 耦合在上支架 242.1 和下支架 242.4 之間的蓋子 242.2,(iii) 至少一個致動器,優選兩個致動器,J8.1-J8.2 242.3,(iv) 下支架 242.4。
i. 頭部部分
[0136] 圖 6-8 分別是人形機器人 1 的頭部和頸部元件 10 的前檢視、側檢視和俯檢視。如這些圖所示,頭部部分 202a 包括:(i) 具有下部範圍 236a 和上部範圍 236b 的第一或前殼元件 236,和 (ii) 具有下部範圍 238a 和上部範圍 238b 的第二或後殼元件 238,其中所述後殼元件 238 耦合到前殼元件 236。第一或前殼元件 236 和第二或後殼元件 238 的組合協同工作以限定頭部容積,其中電子元件 222 位於所述頭部部分 202a 內的所述頭部容積內。換句話說,第一或前殼元件 236 和第二或後殼元件 238 的組合至少部分地,並且優選地完全地包圍所述電子元件 222。具體地,所述電子元件 222 可以位於前護板 288 和後殼元件 238 之間。
[0137] 前護板 288 包括:(i) 具有曲線表面的主體 288.2,(ii) 從所述曲線表面延伸的後突起或邊緣 288.4,(iii) 感測器突起集合 288.6,其圍繞形成在前護板 288 中的感測器凹槽 290 的一部分,以及 (iv) 多個發光外殼突起 288.8a-288.8d,其從邊緣 288.4 向內延伸。前護板 288 還包括:(i) 上凹陷範圍 288.10,其形成在感測器突起集合 288.6 的一部分和邊緣 288.4 之間;(ii) 下凹陷範圍 288.12,其形成在感測器突起集合 288.6 的一部分、邊緣 288.4 和發光外殼突起 288.8a-288.8d 之間,並且其中感測器區域 290 位於上凹陷範圍 288.10 和下凹陷範圍 288.12 之間。
[0138] 下凹陷範圍 288.12 可以包括定位以容納顯示器 330 的顯示器開口 288.12.2。顯示器 330 可以是矩形、正方形、圓形或任何其他已知形狀。下凹陷範圍 288.12 可以包括佈置在顯示器開口 288.12.2 周圍的輪廓,以在不阻擋視線的情況下容納顯示器 330 的彎曲形狀。下凹陷範圍 288.12 還可以具有錐形延伸和/或包括位於顯示器開口 288.12.2 和邊緣 288.4 之間的額外輪廓。在其他實施例中,前護板 288 可以被省略,且面罩 236.2 可以不是不透明的。此外,多個發光外殼突起 288.8a-288.8d 可以被省略,且照明元件 240.4 可以安裝在面罩 236.2 和後殼元件 238 之間。此外,照明元件 240.4 可以被省略和/或可以加入或省略其他電子裝置。
[0139] 前護板 288、前殼元件 236 和頭部 202a 的感測器區域 290 包括前感測器凹槽 290.2。前感測器凹槽 290.2 為頭部部分 202a 提供了一個帶有蓋子 292 的嵌入區域,該蓋子具有非曲線範圍。使用所述蓋子 292 有利地最小化了如果頭部感測器元件 997 位於後面並被要求通過具有曲線設計的面罩或蓋子獲取資料時可能引起的潛在失真。因此,頭部感測器元件 997 可以免去使用複雜的演算法來移除或嘗試移除由所述曲線面罩或蓋子引起的失真。然而,如在其他實施例中所解釋的,所述前感測器凹槽 290.2 可以被省略,並且頭部感測器元件 997 可以利用所述演算法來移除或嘗試移除由所述曲線面罩或蓋子引起的失真。
[0140] 所述前感測器凹槽 290.2 包括:(i) 一個擱板 290.2.2,(ii) 一個懸垂部 290.2.4,(iii) 一個感測器蓋 292,和 (iv) 在擱板 290.2.2 和懸垂部 290.2.4 之間延伸的側壁 290.2.6, 290.2.8,如圖 6 所示。前感測器凹槽 290.2:(i) 位於下範圍 236a 之上和上範圍 236b 之下,(ii) 形成一個空腔 290.1,為其上部前置感測器(例如,上部相機)302 提供無阻礙的視野,(iii) 位於顯示器 330 之上,並且 (iv) 位於發光外殼突起 288.8a-288.8d 之上。擱板 290.2.2 從感測器蓋 292 向前並向下延伸到前殼元件 236 形成預定角度,其中確定所述角度是為了避免干擾感測器的操作範圍。擱板 290.2.2 的這種設計使其能夠提供上述空腔 290.1 的下界。應當理解,在其他實施例中,擱板 290.2.2 可能不是成角度的,而是可以是垂直的,或基本上垂直於感測器蓋 292 的一部分。
[0141] 懸挑部290.2.4由前殼元件236在其上部區域236b向前突出並超出感測器蓋292所形成,兼具功能性與防護作用,並構成上述腔體290.1的上邊界。該懸挑部290.2.4可充當防護罩,用於抵禦直射陽光、降水或碎屑等環境因素,從而提高感測器(例如相機)的耐久性和可靠性。此外,將擱板290.2.2與懸挑部290.2.4連接起來的曲面過渡區域,可實現平滑過渡,減少可能破壞結構完整性或影響美觀外觀的尖銳邊緣或不連續處。進一步地,擱板290.2.2相對於平面感測器蓋292向前且向下延伸,並與懸挑部290.2.4一起,相對於後殼向外延伸,以增大擱板290.2.2與懸挑部290.2.4之間的間距。包圍凹槽290.2的側壁290.2.6和290.2.8為上述腔體290.1提供橫向邊界,同時提供結構剛度並對側向衝擊提供額外防護。凹槽290.2被設計為確保嵌入式感測器(例如相機)在凹槽290.2內以及相對於感測器蓋292保持最佳對準。
[0142] 所述前護板 288 和面罩 236.2 之間的嵌入性質和位置關係有助於確保機械應力(例如由衝擊或振動引起的應力)分佈在整個外殼元件上,最大限度地減少局部變形或故障。此外,擱板 290.2.2 被配置為通過互補的幾何形狀(如凹槽或缺口)與面罩 236.2 互鎖,確保精確對齊和牢固配合。這種互鎖機制增強了兩個元件之間的結構結合,防止操作過程中的移位。懸垂部 290.2.4 通過提供一個保護蓋進一步加強了這種關係,該保護蓋遮蔽了凹槽和面罩 236.2 之間的連接處,減輕了環境暴露和機械磨損。
[0143] 前感測器凹槽 290.2 包括一個上頭部感測器開口或開口 291,其位於前感測器凹槽 290.2 的中心。所述中心開口 291 不延伸穿過面罩 236,而是延伸穿過前護板 288。如圖 6 最佳所示,所述開口 291 的寬度 Wo 小於頭部 202a 的寬度 Wh,並且優選小於顯示器開口 288.12.2 和/或顯示器 330 的寬度 Wd。然而,開口 291 的寬度 Wo 小於感測器蓋 292 的寬度。這使得感測器蓋 292 能夠延伸穿過形成在第一殼元件 236 或前護板 288 中的開口 291 的至少大部分。同樣,上頭部感測器開口或開口 291 的高度大於鏡頭 302.2a-302.2b。雖然在本實施例中上頭部感測器開口或開口 291 未在面罩 236.2 中形成,但應當理解,本申請設想直接在面罩 236.2 中形成所述上頭部感測器開口或開口 291。因此,面罩 236 將包括一個開口,該開口將允許包含一個平坦或平面的蓋子定位在其中、其後或其前,這將在面罩 236.2 中形成一個平坦或平面的區域。
[0144] 前部感測器凹槽290.2及其相關元件通常採用高強度、輕量化材料製成,以同時滿足機械耐久性和環境韌性的雙重要求。這些材料可以包括或不包括聚合物、金屬,以及本文披露的任何其他材料或材料組合。對於需要增強電磁遮蔽的應用,前部感測器凹槽290.2、前部防護罩288和/或頭部202a的其他元件可以鍍覆導電材料,或整合類似法拉第籠的特徵以最大限度地減少干擾。製造工藝可以包括精密注塑成型、數控加工(CNC)、沖壓、鑄造或任何其他已知的製造方法。表面處理可以採用陽極氧化、粉末塗層或耐候塗層等方式,以提高其使用壽命以及對磨損和環境暴露的抵抗能力。
[0145] 感測器蓋 292 位於懸垂部 290.2.4 和擱板 290.2.2 之間,鄰近上頭部感測器開口或開口 291,並且與位於感測器蓋 292 後的相機 302 的鏡頭 302.4 的一部分大致平行。因此,感測器蓋 292 用作感測器(例如,相機)的光學窗口,並且被設計為最小化失真或干擾。感測器蓋 292 可以是平面的(如圖所示)、凸面的、凹面的,包括多層材料或塗層,和/或具有上面結合下軀幹感測器蓋 172.8 討論的任何配置。此外和/或或者,感測器蓋 292 可以具有形成於其中的開口,用於接納感測器的一部分(例如,相機鏡頭)。在進一步的實施例中,前感測器凹槽 290.2 可以被省略,且面罩 236.2 可以包括形成於其中的開口,用於接納感測器的一部分(例如,相機鏡頭)。最後,感測器蓋 292 可以與面罩 236.2 一體成型,其中所述面罩 236.2 包括一個基本上平面或平坦的部分。換句話說,面罩 236.2 可以具有環繞平坦或平面部分的曲線部分,或者面罩 236.2 可以具有基本上平坦或平面的配置,其中具有平坦或平面部分的特定感測器部分不是必需的。此外,感測器蓋 292 沿第一平面延伸,該第一平面基本上平行於位於感測器蓋 292 後的相機鏡頭的第二平面。
[0146] 為了避免在面罩 236.2 中形成平坦或平面部分,面罩 236.2 包括一個主體 236.2.2,兩個從主體 236.2.2 向上延伸的翼狀突起 236.2.4, 236.2.6,以及位於兩個翼狀突起 236.2.4, 236.2.6 之間的中央凹口 236.2.8。因此,面罩 236.2 被設計為至少部分環繞(例如,在三側)和/或符合前感測器凹槽 290.2。環繞或符合前感測器凹槽 290.2 主要是通過允許翼狀突起 236.2.4, 236.2.6 位於前感測器凹槽 290.2 的側面並具有鄰近前感測器凹槽 290.2 的曲線邊界的部分來實現的。在其他實施例中,面罩 236.2 不覆蓋前感測器凹槽 290.2 或位於其外部。此外,從側面看,面罩 236.2 可能具有向後傾斜的大致線性的邊緣 236.10,其向前角度(例如,從水平向後延伸)在 90 度和 140 度之間,當機器人 1 處於正常垂直位置(頭部的矢狀面和冠狀面分別平行於機器人 1 的矢狀面和冠狀面)時,優選為水平方向的 110 度。面罩 236.2 的曲率可能有所不同,並在不同位置具有不同的曲率(即半徑和弧度),其中一些在通過引用全文併入本文的美國臨時申請 63/707,949 和 63/707,897 中披露。面罩 236.2 可以包括光凹槽 236.2.12 以符合光發射器外殼 288.8a-288.8d 的形狀。面罩 236.2 可以由上面披露的任何材料製成,包括任何數量的層、塗層,和/或可以是透明的、不透明的,或包括透明區域和不透明區域。
ii. 頸部部分
[0147] 如上所述,頸部部分 202b 包括:(i) 上支架 242.1,(ii) 耦合在上支架 242.1 和下支架 242.4 之間的蓋子 242.2,(iii) 至少一個致動器,優選兩個致動器,J8.1-J8.2 242.3,(iv) 下支架 242.4。致動器 242.3 可以允許頭部:(i) 圍繞第一頸軸或頭部“否”軸扭轉或旋轉,和 (ii) 圍繞第二頸軸或頭部“是”軸傾斜或改變俯仰角。與傳統機器人不同,致動器 242.3 隱藏在可變形頸盾 242.2 下方。致動器的運動導致可變形頸盾 242.2 變形並適應此類運動。可變形頸盾 242.2 設計為延伸至頭部部分 202a 的下巴線並進入頭部部分 202a 的後部範圍,而不延伸進入頭部 202a 的側面區域。這種配置確保了頸盾 242.2 充分連接到頭部 202a,但最大限度地減少了可變形頸盾 242.2 覆蓋的頭部表面積。最大限度地減少頭部 202a 側面區域中可變形頸盾 242.2 的覆蓋範圍允許在這些區域中使用更耐用的材料而不使用重疊材料。這就比傳統機器人頭部更有利,因為它減少了材料和/或增加了對包含在頭部內的電子裝置的側向保護。
[0148] 頸部護罩 242.2 的前部範圍,連同上部安裝座 242.1,包括形成於其中的感測器孔徑 242.2.2,以最小化如果頭部感測器元件 997 設定在頸部護罩 242.2 之後並需要透過頸部護罩 242.2 獲取資料時可能引起的潛在失真。像上文描述的上部頭部感測器蓋 292 一樣,利用下部頭部感測器蓋 293 來保護頭部感測器元件 997。因此,上述描述的配置、材料、層和塗層可以與所述下部感測器蓋 292 結合使用。此外,所述下部感測器蓋 293 定位在頸部部分 202b 內,並設計為至少覆蓋大部分,優選覆蓋全部形成於所述頸部護罩 242.2 以及上部安裝座 242.1 內的感測器孔徑 242.2.2。最後,在其他實施例中,下部感測器蓋 293 可以省略,且所述下部感測器蓋 292 可以與頭部部分 202a 和/或面罩 236.2 一體成型。
[0149] 可變形頸部護罩 242.2 可以由多種柔性且耐用的材料構成,以適應人形機器人 1 的頭部 202a 的動態運動(例如,頭部的扭轉和俯仰),同時保持時尚和功能性的外觀(例如,不擠壓或起皺)。用於可變形頸部護罩 242.2 的合適材料可包括可拉伸織物,如氨綸(spandex)、氯丁橡膠(neoprene)或聚酯混合物,這些材料提供彈性和回彈性。或者,可以使用可變形塑料,如熱塑性彈性體(TPE)、矽膠或聚氨酯,以提供靈活性和耐用性。
[0150] 頸部護罩 242.2 可以具有多層結構,其中內層為內部元件提供舒適和保護,而外層增強美觀吸引力並防止環境因素(如灰塵、濕氣和紫外線輻射)的影響。在一些實施例中,可變形頸部護罩 242.2 可以結合加強部分或嵌入式支撐結構,以確保在高應力區域(如底部或連接點)的耐用性。這些加強可以通過整合柔性網狀織物、碳纖維插入件或類凱夫拉(Kevlar-like)材料來實現,以防止長期使用後的磨損和撕裂。此外,可變形頸部護罩 242.2 可以包括記憶織物或形狀保持聚合物,幫助其在變形後恢復原始狀態,確保持續的性能和外觀。
[0151] 為了進一步提高其功能性,頸部護罩242.2可以被設計成分段式或風箱式結構,使其在各個方向上都能實現更平滑、更可控的運動,而不會產生可能影響機器人1外觀或性能的摺痕或褶皺。該設計還可以在適當位置設定通風孔或透氣區域,以防止頸部區域內部熱量積聚,尤其是在機器人1長時間執行階段。頸部護罩242.2的變型還可以具有可定製的表面處理,例如啞光、光面或帶紋理的塗層,以適配機器人1預期的使用場景或美學需求。在某些情況下,頸部護罩242.2可以通過疏水或抗靜電塗層處理,以提高其對環境污染物的抵抗能力。此外,頸部護罩242.2還可以整合感測器,例如應變計或壓力感測器,用於監測頭部運動過程中產生的應力和應變,並向機器人1的控制系統提供反饋,以實現更精確的電機調節。在某些實現方式中,頸部護罩242.2還可以設計為模組化或可互換結構,便於更換或定製。該模組化設計還能促進快速維修與維護,從而將機器人1的停機時間降至最低。
b. 頭部感測器
[0152] 圖 11 是頭部感測器元件 997 的側檢視,它可以包括各種感測裝置和系統,以增強人形機器人 1 在各種環境中的感知能力和適應性。像軀幹感測器元件 998 一樣,頭部感測器元件 997 可以包括:(i) 一個或多個相機 302a, 302b, 304a, 304b,(ii) 用於檢測環境或物體溫度以進行安全和操作調整的溫度感測器,(iii) 用於測量接觸或表面壓力的壓力感測器,(iv) 用於在互動過程中檢測施加力的力感測器,(v) 用於接近度和金屬物體檢測的電感感測器,(vi) 用於感知觸摸或接近的電容感測器,(vii) 這些感測器的任意組合,或 (viii) 其他已知感測器,包括用於額外環境監測的超聲波、聲學或氣體感測器。所述頭部感測器元件 997 定位在頭部體積內,其中所述頭部體積限定在第一外殼 236 和第二外殼 238 之間。
[0153] 如圖 10A 和 10B 所示,頭部感測器元件 997 可以包括:(i) 一組第一或上部相機 302a、302b,其具有上部相機鏡頭 302.2a、302.2b,以及上部相機機身 302.4a、302.4b;以及 (ii) 一組下部相機 304a、304b,其具有下部相機鏡頭 304.2a、304.2b,以及下部相機機身 304.4a、304.4b。由此,所述相機 302a、302b、304a、304b 佈置在所述頭部容積內,并包括:(i) 第一相機 302a,具有第一相機機身 302.4a 和第一相機鏡頭 302.2a,第一相機鏡頭 302.2a 設定在罩蓋 292 與第一相機機身 302.4a 之間;(ii) 第二相機 302b,在水平方向上相對於第一相機 302a 有偏移,并包括第二相機機身 302.4b 和第二相機鏡頭 302.2b,第二相機鏡頭 302.2b 設定在罩蓋 292 與第二相機機身 302.4b 之間;(iii) 第三相機 304a,佈置在第一和第二相機 302a、302b 的下方(並非在豎直方向上完全對齊),其中第三相機 304a 包括第三相機機身 304.4a 和第三相機鏡頭 304.2a,第三相機鏡頭 304.2a 設定在罩蓋 293 與第三相機機身 304.4a 之間;以及 (iv) 第四相機 302a 在水平方向上相對於第三相機 304a 有偏移,并包括第四相機機身 304.4a 和第四相機鏡頭 304.2a,第四相機鏡頭 304.2a。
[0154] 應當理解,相機的編號可以從上述描述的配置中更改。例如,左上相機 302a 可以是第一相機,左下相機 304a 可以是第二相機,右上相機 302b 可以是第三相機,右下相機 304b 可以是第四相機。此外,底部兩個相機 304a, 304b 可以是第一和第二相機,而頂部兩個相機 302a, 302b 可以是第三和第四相機。同樣,左上相機 302a 可以是第一相機,右下相機 304b 可以是第二相機,右上相機 302b 可以是第三相機,而左下相機 304a 可以是第四相機。此外,軀幹相機可以是任何編號,包括第三、第四等。基於本公開內容,應當理解說明書中包含的或圖中顯示的任何相機都可以關聯任何編號。
[0155] 如圖 10A, 10B, 11 所示,第一、第二、第三和第四相機 302a, 302b, 304a, 304b 具有固定位置,因此它們被耦合到內部安裝框架 240 的相應安裝位置上。相機 302a, 302b, 304a, 304b 可以包括以下元件、方面、部件、功能和/或特徵:0.4 MP 到 200 MP 之間的百萬像素解析度,可以 5.6 FPS 到 286 FPS 錄製視訊,可以具有 CMOS 感測器,像素尺寸範圍可以從 2.4 um 到 6.9 um,可以利用星光捲簾快門(starves rolling shutter)技術,可以在 55 攝氏度的環境空氣溫度下運行,並且可以具有本文討論的或美國專利 11,402,726、11,599,009、11,333,954 或 11,600,010 中討論的任何其他屬性、技術或特徵,所有這些專利均通過引用併入本文。應當理解,相機通常配置為視訊相機,但也可以具有替代配置,例如圖像相機。
[0156] 此外,兩個上部相機或第一和第二相機 302a, 302b 可以定位在顯示器 330 上方並指向前方,而兩個下部相機 304a, 304b 可以定位在顯示器 330 下方並以向下和向前的角度(定位)。如圖 4-5 所示,上部相機 302 和下部相機 304 可以定位成不同角度以提供集體視場 (FoV)。例如,上部感測器元件 302 可以策略性地安裝在前額,直接指向前方,垂直於機器人 1 的冠狀面 PF。雖然下部感測器元件 304 可以相對於冠狀面 PF 以 55 至 83 度之間的角度,例如大約 72 度,向下和向前傾斜,以最大化兩個感測器的集體視場。這種策略性放置可以在機器人 1 的前方產生顯著的垂直視場,有效地減少盲點並提供對機器人 1 基座周圍環境的更完整理解——這對於避障和與附近物體互動至關重要。
[0157] 在其他實施例中,頭部感測器元件 997 可以包括額外或不同的相機或相機組 302。例如,相機 302 可以包括後向相機以監測機器人 1 後方的區域,這可以在向後移動期間或當機器人 1 在具有多個移動物體的動態環境中操作時提高安全性。在某些方面,安裝在頭部兩側的側裝相機可以提供完整的 360 度視野,確保機器人 1 能夠檢測到橫向移動和周邊活動。在某些實施方式中,相機 302 可以安裝在可調節或可伸縮的手臂上,或者可以是可拆卸的,以便能夠根據具體的操作要求重新配置或重新定位它們。這些可調節支架可以包括電動機構以動態調整每台相機的角度和位置,允許針對不同任務和環境進行即時適應。例如,在檢查任務期間,相機可以重新定向以聚焦特定的感興趣區域,而在導航期間,它們可以返回默認位置以最大化機器人 1 的視野。
[0158] 此外,頭部感測器元件 997 可以結合先進的成像技術,如多幀降噪演算法,以提高低光條件下的圖像清晰度。先進的自動對焦系統,包括相位檢測和對比度檢測自動對焦,可以被整合以提供快速和精確的對焦調整。為了增強環境適應性,頭部感測器元件 997 可以配備偏振濾光片以減少眩光並提高在反光或水覆蓋環境中的可見度。為了可靠性和冗餘性,頭部感測器元件 997 可以具有模組化相機 302,這些相機可以被熱插拔,允許無縫更換而不會中斷機器人 1 的操作。這些單元還可以包括自清潔機制,如疏水塗層、用於去除灰塵的超聲波振動系統,或用於保持鏡頭清晰度的小型雨刮器。此外,可以整合自動化診斷系統以監控每台相機 302 的健康和性能,向機器人 1 警報潛在問題並實現主動維護。為了增強在惡劣環境中的彈性,相機 302 可以安置在具有減震支架的堅固外殼中,保護它們免受物理衝擊和振動。
[0159] 雖然頭部感測器元件 997 被圖示為相機,但應當理解,可以利用其他類型的感測器並以類似方式安裝到內部框架上,以實現各種檢測、感測或訊號接收任務的最佳方向對準。例如,頭部感測器元件 997 可以結合飛行時間 (ToF) 感測器、與紅外相機配對的結構光投影儀、具有可變基線的立體相機以增強深度感知並生成精確的三維空間圖,和/或本文描述的任何其他感測器、部件、技術、方面或元件。此外,可以整合雷達和超聲波感測器以提供冗餘的距離測量,這在低能見度條件或動態環境中特別有價值。在某些實施例中,可以採用 LiDAR 感測器進行精確的遠距離距離測量,而熱成像相機可以檢測熱特徵並監測溫度變化。多光譜或高光譜成像系統可以通過基於材料獨特的光譜特徵識別材料來進一步改善物體識別,從而增強機器人 1 導航和解讀複雜環境的能力。
F. 足部感測器元件
[0160] 如圖 2-3 所示,感測器元件陣列 995 至少包括佈置在頭部元件中的一個頭部感測器元件 997、佈置在軀幹元件中的至少一個軀幹感測器元件 998,以及佈置在每個腿部元件中的至少一個腳部感測器元件 932.2。腳部感測器元件 932.2 可以整合一種或多種飛行時間(TOF)相機、雷射接近感測器和漫射型接近感測器,或本文公開的任何其他技術或感測器。這些感測器可以基於不同的工作原理運行,並提供多樣的資料流,這些資料流可以進行關聯,從而建構出全面且可靠的環境地圖,從而有望降低與共因故障相關的風險。相較於在變化光照條件下可能表現不佳且需要複雜處理演算法的傳統基於相機的感測器,腳部感測器元件 932.2 的多樣化感測器組合即使在具有挑戰性的環境中也能提供穩健且可靠的資料。這種內在的多樣性提供了容錯能力,確保當某一類感測器受損——例如相機被眩光致盲時——來自其它感測器的資料仍然能夠提供關鍵的環境資訊,防止感知失效。多模態資料流可以用來有效探測腳底正下方的特徵,使得接觸或接近檢測器能夠通過記錄預期或非預期的壓力,或地面距離的變化,識別諸如上/下樓梯、懸崖或空洞等危險。
[0161] 人形機器人 1 的足部元件 92 可以包括接納通過鞋底 920 連接感測器元件 932.2 的孔。這些孔可以允許感測器 932.2 具有無遮擋的視場,例如大約 45 度。感測器元件 932.2 可以安裝在足部基座結構 922 的中心或足部元件 92 的腳趾盒部分 924 內的足部基座結構 922 的前部。感測器部分 932.2 可以被從足部基座結構 922 前部延伸到距骨框架 880 邊緣的外殼 932.1 包圍,在保持足部 92 結構完整性的同時創造無縫和整合的外觀。該外殼 932.1 為內部元件(包括感測器元件 932.2)提供了額外的保護層,確保它們在各種操作條件下的耐用性和壽命。
G. 運動和視場
[0162] 所公開的感測器元件被策略性地定位在人形機器人 1 的頭部 10 和軀幹 16 內,使得感測器 996 提供重疊和互補的視場 (FoVs),減少了對持續的頭部 10 和軀幹 16 運動的需求,增強了機器人 1 感知環境並對其做出反應的能力。圖 2 是圖 1 機器人中包含的感測器 996 的透檢視,展示時沒有外殼和機器人 1 的其他元件,以說明當機器人 1 直立站立時感測器的內部放置。如圖 2 所示,頭部 10 可以包括感測器元件 997。感測器元件 997 可以包括一個或多個相機、溫度、壓力、力、電感、電容、這些感測器的任何組合或其他已知感測器。在說明性示例中,感測器元件 997 包括一組上部相機 302a, 302b 和一組下部相機 304a, 304b,它們被耦合到內部安裝框架的相應安裝位置上。例如,兩個上部相機 302a, 302b 可以定位在顯示器 330 並指向前方,且兩個下部相機 304a, 304b 可以定位在顯示器 330 下方並呈向下和向前的角度(如圖 9-10 所示)。
[0163] 圖 3 是圖 2 中相同感測器 995 的俯檢視,未顯示外殼和機器人 1 的其他元件,以說明感測器 995 的內部放置。上部相機 302a, 302b 顯示在下部相機 304a, 304b 和前部軀幹感測器元件 208.2 的頂部。圖 4 是包含在機器人 1 的上部部分 997 和中心部分 998 中的感測器 996 的側檢視,圖 5 是包含在機器人 1 的上部部分 997 和中心部分 998 中的感測器 996 的前檢視。
[0164] 如圖 4-5 所示,上部相機 302a, 302b 是水平對齊的,下部相機 304a, 304b 也是如此。上部相機 302a, 302b、下部相機 304a, 304b 和前部軀幹感測器元件 208.2 均定位在軀幹 16 的前部範圍內,並與軀幹 16 的前部範圍垂直對齊。此外,上部相機 302a, 302b 和下部相機 304a, 304b 沿著與機器人 1 的矢狀面平行的平面對齊。因此,包含在前部軀幹感測器元件 208.2 中的第三相機(例如,208.3.2.8)既定位在軀幹 16 的前部範圍內,又與第一相機 302a 的範圍基本垂直對齊。同樣,包含在前部軀幹感測器元件 208.2 中的第四相機(例如,208.3.2.2)既定位在軀幹 16 的前部範圍內,又與第二相機 304a 和第四相機 304b 的範圍基本垂直對齊。最後,包含在前部軀幹感測器元件 208.2 中的第五相機(例如,208.3.2.6)定位在軀幹 16 的前部範圍內,並與第三相機 302a 的範圍基本垂直對齊。
[0165] 兩者展示時均沒有外殼和機器人 1 的其他元件,以說明關於感測器 996 相對放置的細節。上部相機 302a, 302b、下部相機 304a, 304b、前部感測器元件 208.2 和後部感測器元件 208.4 之間的相關安裝距離和角度分別在表 1 和表 2 中說明。例如,上部相機 302a, 302b 和下部相機 304a, 304b 之間的距離在 140mm 和 210mm 之間,優選範圍為 157mm - 192mm。同樣,後部感測器元件 208.4 距離下部相機 304a, 304b 水平安裝距離為 147mm - 220mm,且在前部感測器元件 208.2 上方 292mm - 439mm,與垂直軸的角度為 16 - 24 度。
[0166] 如表 2 所示,下部相機 304a, 304b 可以以相對於垂直軸 55 - 83 度的角度安裝,優選在 62 - 76 度之間,這與上部相機 302a, 302b 的安裝角度不同,後者幾乎垂直於垂直軸。定位在不同角度的上部相機 302a, 302b 和下部相機 304a, 304b 有利於以其各自視場 (FoVs) 之間的最小重疊提供組合的更飽滿的視場 (FoV)。
表 1
表 2
[0167] 上部相機 302a, 302b 可以水平對齊並間隔開與下部相機 304a, 304b 之間的基線 B2 不同的基線 B1,下部相機也可以水平對齊,如圖 5 所示。這種使用具有不同基線 B1 和 B2 的立體相機為機器人 1 提供了強大的深度感知能力,增強了其導航、操縱物體和與其環境安全互動的能力。例如,具有較大基線(例如,302a 和 302b 之間的 B1)的相機針對長距離深度檢測進行了最佳化,並可以為較遠的物體提供精確的深度資訊,這對於遠距離的導航和障礙物檢測至關重要。而具有較短基線(例如,304a 和 304b 之間的 B2)的相機設計用於短距離深度感知,這可以為靠近機器人 1 的物體提供精確的深度資訊,例如在操縱任務期間或在不平坦地形導航時。通過 302a, 302b, 304a, 304b 進行的長距離和短距離深度感知的結合使機器人 1 的動作更加精確和安全。此外,兩個獨立的立體系統的存在確保了來自兩個感測器的資料交叉參考是可能的——如果一個被遮擋或發生故障,另一個仍然可以提供基本的深度資訊,增強機器人 1 在各種環境中的可靠性。在其他實施方式中,上部相機之一(302a 或 302b)和下部相機之一(304a 或 304b)可以組合形成一對,以在人形機器人直立站立時提供立體視覺,即使它們是垂直分開定位的。可能需要特殊處理來計算此配置的深度圖。
[0168] 機器人 1 的 FoV 不是靜態的,而是可以隨著機器人 1 移動頭部 10 和軀幹 16 而動態變化。這種能力對於導航複雜環境和增強態勢感知是有用的。圖 17-21 是說明當人形機器人 1 移動頭部 10 和軀幹 16 時感測器的變化垂直 FoV 的側檢視。FoV 指的是感測器 996 在任何給定時刻可以捕獲的可觀察環境的範圍,通常使用角度描述。FoV 具有兩個主要份量來定義檢視的邊界:(i) 垂直視場 FoV,測量“上下”角度,從感測器檢視中可見的最低點到最高點,以及 (ii) 水平或橫向視場 FoV,測量“左右”角度,從感測器檢視中可見的最左點到最右點。應當注意,“V”表示視場的垂直份量或範圍,而“H”表示視場的水平或橫向份量或範圍。
[0169] 如圖 17 所示,上部相機元件 302a, 302b 的垂直視場 FoVv1 由視線中心線 L10 兩側的線 L11 和 L12 之間的角度或區域定義。在一些實施方式中,頭部 10 中的上部相機 302a, 302b 可以具有約 20 度至約 110 度的前向垂直視場 FoVv1,優選約 60 度至約 90 度(例如,上部相機 302a, 302b 的垂直視場 FoVv1 約為 76 度)。當機器人 1 處於伸展、直立站立位置 Su(圖 17 和圖 7)時,線 L11 和冠狀面 PF 之間形成的上部角度約為 52 度。然而,如圖 18-21 所示,由於通過包含在機器人 1 頸部的致動器 J8.1 和 J8.2 進行的機器人 1 的頭部 10 的單獨運動,該角度可以改變 30 度。換句話說,冠狀面 PF 和線 L11 之間的這個角度可以在頭部向下姿勢 Hd(圖 20)中的 22 度到頭部向上姿勢 Hu(圖 18)中的 82 度之間變化。當機器人 1 移動其軀幹 16 的位置時,這些角度可以進一步增加或減少,這顯示在圖 19 和 21 中。換句話說,當機器人 1 移動其頭部 10 和/或軀幹 16 時,冠狀面 PF 和 FoVv1 的視線中心線 L10 之間的上部角度被設計為改變。
[0170] 同樣,下部相機元件 304a, 304b 具有由線 L21 和 L22 之間的角度或區域定義的垂直視場 FoVv2。在一些實施方式中,頭部 10 中的下部相機 304a, 304b 可以具有約 20 度至約 110 度的最大向下垂直視場 FoVv2,優選約 30 度至約 70 度(例如,下部相機 304a, 304b 的垂直 FoVv2 可能是約 55 度)。然而,垂直視場 FoVv2 由於頭部部分 202a 和頸部部分 202b 的設計而受到限制。雖然下部相機元件 304a, 304b 垂直視場 FoVv2 與上部相機元件 302a, 302b 相同,但實際垂直視場 FoVv2 小於垂直視場 FoVv1。同樣如圖 15 所示,下部相機 304a, 304b 的視線中心線 L20 與機器人頭部 10 的冠狀面 PF 有約 38.5-45 度的下角度。然而,如其他實施例所示,下部相機元件 304a, 304b 及其垂直視場 FoVv2 可以被省略,和/或它可能具有大於垂直視場 FoVv1 的垂直視場 FoVv2。
[0171] 如圖 17 所示,前軀幹感測器元件 208.2 的豎直視場 FoV_V3 由視線中心線 L30 與線 L31 和 L32 之間的夾角或區域來限定。在某些實施例中,當機器人 1 處於伸展的直立站立姿態(圖 17)時,前軀幹感測器元件 208.2 可以具有約 85° 的面向前方的豎直視場 FoV_V3,而視線中心線 L30 相對於冠狀面 PF 向前偏轉約 45°。如圖 17 最清楚所示,當機器人 1 至少處於中立姿態 Su 時,軀幹 16 還包括一個第三攝影機(例如 208.3.2.2、208.3.2.6、208.3.2.8 中的一個),該第三攝影機設定在前軀幹感測器元件 208.2 內,並且所述前軀幹感測器元件 208.2 的一部分位於軀幹 16 內、手臂 5 的下方,其豎直視場 FoV_V3 的中心線 L30 與人形機器人 1 所站立的基本平坦支撐表面 S 不平行。換言之,豎直視場 FoV_V3 的中心線 L30 相對於支撐表面 S 是傾斜的,其內角可以在 30° 到 50° 之間。同樣,如圖 17 所示,當機器人 1 至少處於中立姿態 Su 時,軀幹 16 還包括一個第四攝影機(例如 208.3.2.2、208.3.2.6、208.3.2.8 中的一個),該第四攝影機設定在後軀幹感測器元件 208.4 內,且所述後軀幹感測器元件 208.4 的一部分位於軀幹 16 內、頸部部分 202b 的下方,其豎直視場 FoV_V4 的中心線 L_R0 與人形機器人 1 所站立的基本平坦支撐表面 S 不平行。換言之,豎直視場 FoV_V4 的中心線 L_R0 相對於支撐表面 S 是傾斜的,其內角可以在 30° 到 50° 之間。
[0172] 此外,如圖 17 所示,冠狀面 PF 與線 L₃₂ 之間形成了一個下角度,約為 2 度。然而,如圖 21 所示,僅由於機器人 1 的軀幹 16 的運動,該下角度的範圍可以從前彎姿態 Tʜ(圖 19)中的 0 度到後彎姿態 Tв(圖 21)中的 30 度。然而,線 L₃₂ 與冠狀面 PF 之間的下角度並不隨視線中心線 L₃₀ 移動,而是保持在約 0-2 度,這是因為當機器人 1 的軀幹 16 處於中立位置或直立站姿 Sᴜ 或前彎姿態 Tʜ 時,垂直視場 FoVv₃ 可能會被機器人 1 的腿部 6 遮擋。換句話說,冠狀面 PF 與 FoV₃ 之間的上角度被設計為當機器人 1 移動其軀幹 16 時發生變化。同樣,後軀幹感測器元件 208.4 具有由線 L₄₁ 和 L₄₂ 之間的角度或區域限定的垂直視場 FoVv₄,其具有視線中心線 L₄₀,且角度約為 85 度。
[0173] 總之,第一相機 302a 具有 (i) 大於 45 度的第一水平視場 FoVʜ₁,以及 (ii) 大於 15 度的第一垂直視場 FoVv₁。具體而言,所述第一相機 302a 具有在 20 到 110 度之間的垂直視場 FoVv₁,優選在 60 到 90 度之間,最優選在 70 到 80 度之間。此外,所述第一相機 302a 具有在 5 到 100 度之間的水平視場 FoVʜ₁,優選在 30 到 80 度之間,最優選在 50 到 60 度之間。同樣,與第一相機 302a 水平偏移的第二相機 302b 包括 (i) 大於 45 度的第二水平視場 FoVʜ₁,以及 (ii) 大於 15 度的第二垂直視場 FoVv₁。具體而言,所述第二相機 302b 具有在 20 到 110 度之間的垂直視場 FoVv₁,優選在 60 到 90 度之間,最優選在 70 到 80 度之間。此外,所述第一相機 302a 具有在 5 到 100 度之間的水平視場 FoVʜ₁,優選在 30 到 80 度之間,最優選在 50 到 60 度之間。應當理解,第一和第二相機 302a、302b 的視場具有相同的參考編號,以簡化圖示和披露。然而,正如本文所解釋的,應當理解,這些相機中的每一個都具有彼此截然不同、實質上不同或極少不同的視場。
[0174] 如圖 17-21 所示,上部相機 302a、302b 的垂直視場 FoVv₁ 與頭部 10 中的下部相機 304a、304b 的垂直視場 FoVv₂ 可能會或可能不會在機器人 1 前方的重疊區域部分重疊。例如,垂直視場 FoV₁ 與垂直視場 FoVv₂ 部分重疊,因為線 L₁₂ 和 L₂₁ 在以下情況下相交:(i) 機器人 1 處於直立站立位置(圖 17);(ii) 在頭部向下姿態 Hd,即機器人 1 的頭部 10 圍繞頭部點頭(yes)致動器軸線 10.2 向下移動時(圖 18);(iii) 在頭部向下 Hd 且軀幹前彎姿態 Tf,即機器人 1 的頭部 10 圍繞頭部點頭致動器軸線 10.2 向下移動,且機器人 1 的上部部分 2 圍繞髖部 70 俯仰軸 70.2 向下移動時(圖 19);以及 (iv) 在頭部向上 Hu 且軀幹後彎姿態 Tr,即機器人 1 的頭部 10 圍繞頭部點頭致動器軸線 10.2 向上移動,且機器人 1 的上部部分 2 圍繞髖部俯仰軸 70.2 向上移動時(圖 21)。另一方面,當機器人 1 處於頭部向上 Hu 姿態,即機器人 1 的頭部 10 圍繞頭部點頭致動器軸線向上移動時(圖 20),垂直視場 FoVv₁ 與垂直視場 FoVv₂ 不重疊,因為線 L₁₂ 和 L₂₁ 在機器人 1 前方不相交。此外,垂直視場 FoVv₂ 與垂直視場 FoVv₃ 顯著重疊,因為線 L₃₁ 始終與限定垂直視場 FoVv₂ 的線 L₂₁ 和 L₂₂ 相交,如圖 17-21 所示。此外,軀幹 16 和腿部 6 可能會經常遮擋下部相機 304a、304b 的垂直視場 FoVv₂ 的一部分。例如,當機器人 1 處於圖 17 所示的中立位置或直立站姿 Su 時,下部相機 304a、304b 具有機器人 1 前方的垂直視場 FoVv₂,受限於線 L₂₂,約為 33 度至 49 度,優選約為 40 度至 45 度(例如,下部相機 304a、304b 的垂直視場 FoVv₂ 可約為 43 度)。
[0175] 基於上述公開內容,應當理解,機器人 1 的視場 FoV 會隨機器人 1 的運動以及頭部 10 與軀幹 16 之間相對位置的變化而變化。舉例來說,當機器人 1 將頭部 10 和/或軀幹 16 向後傾時,由於第一豎直視場 FoV_V1 與第二豎直視場 FoV_V2(圖 20)之間的重疊區域減小,機器人 1 前方的整體視場可能會增大;而當頭部 10 和/或軀幹 16 向前傾時,由於機器人 1 的腿部 6 對 FoV_V3 產生遮擋,以及第二豎直視場 FoV_V2 與第三豎直視場 FoV_V3(圖 19)之間的重疊區域增加,機器人 1 前方的整體視場可能會減小。因此,第一豎直視場 FoV_V1 的第一中心 L10 可以繞頭部“點頭(yes)”軸或第二頸部軸在第三方向(向下,如圖 18 所示)上移動至少 15°,並且第二水平視場 FoV_H1 的第一中心 L10 可以繞該頭部“點頭”軸或第二頸部軸在第四方向(向上,如圖 20 所示)上移動至少 15°,其中第三方向或向下方向:(a) 與第四方向或向上方向相反,且 (b) 與第一方向和第二方向垂直。需要注意的是,為了簡化表達,圖中通常將 FoV1、第一豎直視場 FoV_V1 的第一中心以及第二水平視場的第一中心 L10 以單一形式示意表示;然而應當理解,每個攝影機實際上都具有各自的視場及其各自的中心。
[0176] 圖 22-24 是展示了仿人機器人 1 在各種姿態下感測器 996 的變化水平或橫向視場 FoVs 的頂檢視。圖 22 是仿人機器人 1 處於中立位置或直立站姿 Su 時的水平視場 FoVs 的頂檢視。如圖 22 和圖 8 所示,機器人 1 的水平視場 FoVs 包括上部相機元件 302a、302b 的前 FoVʜ₁,下部相機元件 304a、304b 的前 FoVʜ₂,前軀幹感測器元件 208.2 的前 FoVʜ₃,以及後軀幹感測器元件 208.4 的後 FoVʜ₄。前水平視場 FoVʜ₁ 和 FoVʜ₂ 由線 Lғ₁ 和 Lғ₂ 限定,視線中心線為 Lғ₀;而後水平視場 FoVʜʀ 由線 Lʀ₁ 和 Lʀ₂ 限定,視線中心線為 Lʀ₀,兩者的寬度均約為 112 度。最後,水平視場 FoVʜ₃ 由線 Lғ₅ 和 Lғ₆ 限定。當仿人機器人 1 處於中立位置或直立站姿 Su 時,線 Lғ₁、Lғ₃ 和 Lғ₅ 位於距機器人 1 的冠狀面 PF 約 34 度的位置。
[0177] 圖 23 和 24 展示了當機器人 1 從中立位置或直立站姿 Su 移動到:(i) 圖 23 中的頭部左轉姿態 Hl,以及 (ii) 圖 24 中的頭部右轉姿態 Hr 時,水平視場 FoVʜ₁ 和 FoVʜ₂ 也就是如何相對於矢狀面以及相對於水平視場 FoVʜ₃ 移動的。具體而言,當機器人 1 圍繞第二頸部致動器的旋轉軸向左或向第三方向轉頭約 60° 時,如圖 23 所示,前水平視場 FoVʜ₁ 和 FoVʜ₂ 也逆時針偏移約 60°。然而,水平視場 FoVʜ₃ 和 FoVʜ₄ 保持不變或未旋轉。同樣,當機器人 1 圍繞第二頸部致動器的旋轉軸向右或向第四方向轉頭約 60° 時,如圖 24 所示,前水平視場 FoVʜ₁ 和 FoVʜ₂ 也順時針偏移約 60°。同樣,在此狀態下,水平視場 FoVʜ₃ 和 FoVʜ₄ 保持不變或未旋轉。換句話說,冠狀面 PF 與 FoVʜ₁ 和 FoVʜ₂ 的視線中心線 Lғ₀ 之間的角度被設計為當機器人 1 移動其頭部 10 時發生變化。
[0178] 注意,當機器人 1 保持軀幹 16 固定同時向左和向右轉動頭部 10 時,後軀幹感測器元件 208.4 的後 FoVʜʀ 保持不變,如圖 23 和 24 所示。總之,當機器人 1 移動其頭部部分 202a 時:(i) 水平視場 FoVʜ₁、FoVʜ₂,垂直視場 FoVv₁、FoVv₂,或所述第一和第二相機的垂直和水平視場 FoV₁、FoV₂ 均發生改變,並且 (ii) 水平視場 FoVʜ₃、FoVʜ₄,垂直視場 FoVv₃、FoVv₄,或所述第三相機(例如,包含在前軀幹感測器元件 208.2 中的 208.3.2.2、208.3.2.6、208.3.2.8 之一)和第四相機(例如,包含在後軀幹感測器元件 208.4 中的 208.3.2.2、208.3.2.6、208.3.2.8 之一)的垂直和水平視場 FoV₃、FoV₄ 保持不變。
[0179] 基於上述披露,應當理解,第一水平視場 FoVʜ₁ 的第一中心 Lғ₀ 可以圍繞第一頸部軸線在第一方向(向左,如圖 23 所示)移動至少 45 度,並且 (ii) 第二水平視場 FoVʜɪɪ 的第一中心 Lғ₀ 可以圍繞第一頸部軸線在第二方向(向右,如圖 24 所示)移動至少 45 度,其中所述第二方向或右側方向與所述第一方向或左側方向相反。需要注意的是,圖中通常將 FoV₁、第一水平視場 FoV₁ 的第一中心以及第二水平視場 Lғ₀ 的第一中心 Lғ₀ 顯示為單一表示,以簡化其表示;然而,應當理解,每個相機都包括其自己的 FoV 和自己的中心。在另一個示例中,頸部部分 202b 可以包括第一自由度 J8.1,其配置為圍繞頭部點頭軸線移動第一水平視場 FoVʜ₁、FoVʜ₂ 的範圍至少 30 度,以及第二自由度 J8.2,其配置為圍繞頭部搖頭(no)軸線移動第一垂直視場 FoVv₁、FoVv₂ 的範圍至少 15 度。
[0180] 頭部感測器 302 和 304 與軀幹感測器 208.2 和 208.4 之間重疊的垂直和水平視場允許機器人 1 拼接出廣角環境地圖,從而減少盲點並提高障礙物檢測能力。例如,在擁擠的倉庫或雜亂的城市環境中,機器人 1 可以利用來自下部相機 304a、304b 和前感測器元件 208.2 的前方地面檢視來檢測障礙物和不平坦的表面,而來自後感測器元件 208.4 的後方檢視則確保在倒車或改變方向時的安全移動。上述先進的感測器配置為仿人機器人 1 提供了多感測器資料融合能力,以增強其移動性和操縱能力,這可能提供除基本導航和環境互動之外的廣泛應用,以及檢測機器人 1 及其環境中的異常行為。
[0181] 軀幹 16 和頭部 10 中的前向感測器 302a、302b、304a、304b 的組合,加上來自多種感測器類型(如飛行時間 (ToF) 和前視紅外 (FLIR))的資料關聯,使仿人機器人 1 能夠以更高的精度和可靠性繪製地圖並在複雜環境中導航。為了最大限度地降低共因失效 (CCF) 等風險,機器人 1 還可以採用冗餘感測器,這些感測器可能來自不同的製造商。這種多感測器方法確保了全面的環境監測;例如,機器人 1 使用足部安裝感測器感知地面障礙物和不平坦表面的能力提供了對於檢測懸崖和空隙等危險至關重要的額外冗餘層。一旦檢測到此類潛在危險,機器人就可以處理來自多個感測器的資料,關聯資訊,並採取立即的保護措施,例如停止、緩慢移動以進行調查或後退,從而防止跌倒並確保人員安全。這種能力使得機器人 1 非常適合在不同的地形上操作,如不平坦的人行道、樓梯或自然戶外環境,在這些環境中,它可以利用相關的環境資料根據地形難度調整步態或速度。它還可以根據感知到的環境資料修改動作,以進行即時路徑規劃。例如,如果機器人 1 通過其上部相機 302a、302b 或下部相機 304a、304b 檢測到前方路徑受阻,它可以利用來自後感測器元件 208.4 的後方檢視來識別替代路線或安全倒車。這種由強大的冗餘感測和資料關聯支撐的自適應能力,在繁忙的街道或活躍的建築工地等動態環境中特別有用,在這些環境中,機器人 1 必須不斷適應不斷變化的條件,從而減少未被發現的危險的可能性。
[0182] 此外,頭部 10 和軀幹 16 中的多感測器元件允許機器人 1 高精度地監控其攜帶的物體。例如,如果機器人 1 任務是攜帶易碎物品或形狀不規則的物體,下部相機 304a、304b 可以提供一個物體的詳細檢視,而前感測器元件 208.2 確保機器人 1 的路徑上沒有障礙物。在工業環境中,機器人 1 可以在操縱或運輸材料時利用其感測器檢測並防止與機械或其他物體的碰撞。
[0183] 頭部和軀幹感測器 302、304 與 208.2、208.4 之間重疊的垂直和水平視場也使機器人 1 能夠執行精確的拾取和放置操作。例如,上部相機 302a、302b 可以檢測高架子上的物體,而前感測器元件 208.2 確保機器人 1 的機械手可以在不與附近物品碰撞的情況下接觸到該物體。這種能力在物流和裝配線環境中特別有用,在這些環境中,精準高效的物體操縱至關重要。機器人 1 監控其負載和周圍環境的能力使其成為人機團隊中理想的協作夥伴。例如,在共享工作空間中,機器人 1 可以利用其感測器檢測附近的人類工人並調整其動作以避免碰撞或干擾。例如,來自後感測器元件 208.4 的後方檢視允許機器人 1 檢測接近的人類或物體,確保在協作環境中的安全操作。
[0184] 圖 25A-25D 是展示了帶有用於樓梯導航和懸崖檢測的足部安裝感測器 932.2 的仿人機器人 1 的側檢視。多種感測器可用於這些安全目的,例如飛行時間 (ToF) 相機、雷射接近感測器、漫反射接近感測器,和/或本文披露的任何感測器或感測器組合。例如,足部安裝的漫反射接近感測器 932.2 可以是向下朝向的,並在安全步進範圍內檢測空隙。這些感測器 932.2 使用水平測量值來比較一隻腳 92a 到另一隻腳 92b 的高度,計算表面距離並識別超出安全步進限制的懸崖。如圖 25A 所示,當機器人 1 行走時,下部相機 304 的 FoVv₂ 和來自前軀幹感測器 208.2 的 FoVv₃ 均可用於檢測前方的平坦地面。當機器人 1 向前移動時,頭部 10 中的下部相機 304 可能會檢測到深度的突然變化(圖 25B),因為線 L₂₂ 越過了邊緣,而前軀幹感測器 208.2 可能會通過其 FoVv₃ 內的深度差異來證實對邊緣的檢測,因為線 L₃₂ 仍然在平坦地面上。
[0185] 此時,機器人 1 可能會決定以較小的步幅緩慢接近凹陷邊緣,直到到達邊緣。通過具有線 L₅₁ 和 L₅₂ 之間 FoVv₅ 的感測器 932.2,機器人 1 可以抬起其中一條腿 6 越過邊緣進行調查。如果足部 92 底部的感測器 932.2 檢測到樓梯(圖 25C),機器人 1 可以向前移動並安全地走下樓梯。否則,當感測器 932.2 檢測到深於預定安全限制(例如 25-35 釐米)的凹陷時(圖 25D),機器人 1 可以在將質心前移或後退之前立即停止。此外,機器人 1 可以將雙臂 5 向前移動以產生停止慣性並抵消身體慣性。
H. 替代實施例
[0186] 圖 26-55 展示了感測器元件的四種替代實施例,它們可以與圖 1 所示的仿人機器人 1 的第一實施例互換使用。每種替代實施例具有略微不同的結構和配置,但每個實施例在結構、特徵和大致錐形的形狀上都是相似的。如下文所述,每個實施例的特徵和/或元件可以互換、加入,或從其他實施例的特徵和/或元件中移除。例如,包含在第一實施例下巴中的下部相機 304a、304b(例如,圖 26-31)可以被移除,類似於下部凹槽如何從第四、第五和第六實施例中被移除一樣。此外,在頸部元件中使用可變形材料並在頸部元件中包括致動器以允許頭部移動的功能可以加入到第一實施例的頭部和頸部元件 10 中。應當理解,這些僅僅是示例,任何特徵和/或元件都可以與本文披露的任何其他實施例互換、加入或從中移除。
a. 第二實施例
[0187] 如圖 26 所示,機器人 2001 包括以下部件:(i) 頭部和頸部 2010,(ii) 軀幹 2016,(iii) 左臂和右臂 2005,(iv) 左手和右手 2056,(v) 脊柱和骨盆 2060、2064,(vi) 左腿和右腿 2006,以及 (vii) 左側和右側距骨和足部 2088、2092。每條手臂 2005 包括上肱骨 2030、下肱骨 2036、上前臂 2040 和下前臂 2046 以及手腕 2050。每條腿包括髖部 2070、大腿上部 2076、大腿下部 2080 和脛骨 2084。這些部件為機器人 2001 提供了仿人形狀,并包含各種協同工作的致動器,以使所述機器人 2001 能夠執行類人動作,這是使用傳統機器人無法實現的。機器人 2001 可以擁有類似於人類的運動範圍,以便在以人類為中心的環境中操作。為了簡潔起見,關於機器人 2001 的上述披露將在下文中不再重複,但應當理解,諸如軀幹 2016 和脊柱 2060 等數字通常代表各種實施例中的相似或類同結構。
[0188] 與第一實施例相比,第二實施例在機器人 2001 的感測器設計和放置方面具有若干差異。顯著的變化包括:(i) 類似於第一實施例的軀幹感測器元件 208.2 的頭部感測器元件 2302;(ii) 省略了第一實施例的下頭部或下巴感測器元件 304;(iii) 在頭部 2010 後部增加了一個後向相機 2305;以及 (iv) 頭部結構包含用於容納頭部 2010 後部的後視相機 2305 的凹槽。
[0189] 如圖 27-29 所示,頭部和頸部元件 2010 的功能和操作通常與關於頭部和頸部元件 10 披露的特徵和功能相似或相同。頭部和頸部元件 10 與頭部和頸部元件 2010 之間的主要區別包括前後感測器凹槽 2272、2277 和外殼元件 2220 中的上殼體 2270,以及一個前殼體 2228,由於省略了下頭部或下巴感測器元件 304,該前殼體具有與第一實施例的面罩 236.2 不同的形狀。
[0190] 注意,在第二實施例中,上殼體 2270 被加入到了外殼元件 2220 中,以容納前部和後部感測器凹槽 2272、2277。前感測器凹槽 2272 及其擱板 2284、懸垂部 2285、平面感測器蓋 2286 以及側壁 2287 和 2288,為感測器 2302 提供了一個嵌入區域,該區域可能類似於第一實施例的軀幹感測器元件 208.2,確保無遮擋的視場和保護。擱板 2284 從平面感測器蓋 2286 向前和向下延伸到前殼體 2228,呈預定角度以避免干擾感測器 2302 的操作範圍。後感測器凹槽 2277 用作後向相機 2305 的觀察口或通風系統,其設計映襯了前感測器凹槽 2272 以保持設計一致性,並為相機 2305 提供類似的嵌入區域以確保無遮擋的視場和保護。
[0191] 與第一實施例類似,外殼元件 2220 配置為固定顯示器 2330 和至少一個感測器,例如安裝在電子支架 2254 上並與感測器凹槽 2272 對齊的電子元件 2222 的頭部感測器元件 2302。頭部感測器元件 2302 在設計和操作上可能與第一實施例中的軀幹感測器元件 208.2 或 208.4 實質上相似或相同。例如,感測器元件 2302 可以包括一個中間相機 2208.6、一個紅外投影儀 2208.4、一個左相機 2208.6 和一個右相機 2208.8,以及其他元件。頭部感測器元件 2302 的結構和功能映襯了軀幹感測器元件 208.2 或 208.4 的結構和功能,因此,上文中關於第一實施例中感測器元件 208.2 和 208.4 的詳細描述適用於頭部感測器元件 2302。
[0192] 如圖 27-29 所示,頭部感測器元件 2302 包括具有前左視場 FoV₁ʟ 的左相機 2208.6、具有前中視場 FoV₁ᴍ 的中間相機 2208.2 和具有前右視場 FoV₁ʀ 的右相機 2208.8。在一些實施方式中,多個上部相機 2302 的視線 Losʟ、Losʀ 和 Losᴍ 彼此平行並且在第一方向上垂直於冠狀面 PF(圖 29),而在第二方向上相對於冠狀面 PF 略微傾斜(在圖 28 中距冠狀面 PF 成 91 度角)。由於多個上部相機 2302 中的每個相機 2208.2、2208.6、2208.8 都具有約 44 度的相似水平視場,上部相機 2302 的集體視場 FoV₁ 在水平方向上約為 44 度(圖 29),在垂直方向上約為 60 度(圖 28)。最後,具有視場 FoV₂ 的後置相機 2305 在水平方向上約為 82 度(圖 29),在垂直方向上約為 20 度(圖 28),其中所述視線 Losʀʀ 在兩個方向上都垂直於後平面 PR(圖 29)。
[0193] 這種配置具有由線 Lғ₁ 和 Lғ₂ 之間的角度限定的約 44 度的較窄前水平視場 FoVғ,以及由線 Lʀ₁ 和 Lʀ₂ 之間的角度限定的約 82 度的後水平視場 FoVʀ 以用於後視。當機器人 2001 向左或向右轉動頭部時,前 FoVғ 和 FoVʀ 都會移動。例如,當頭部向左轉動 60° 時,FoVғ 將逆時針旋轉到線 Lғ₁-ₗₑft 和 Lғ₂-ₗₑft 之間的區域,而 FoVʀ 移動到線 Lʀ₁-ₗₑft 和 Lʀ₂-ₗₑft 之間的區域。另一方面,當機器人 2001 向右轉動頭部時,前 FoVғ 順時針旋轉到線 Lғ₁-ᵣᵢgₕₜ 和 Lғ₂-ᵣᵢgₕₜ 之間的區域,而後 FoVʀ 順時針旋轉到線 Lʀ₁-ᵣᵢgₕₜ 和 Lʀ₂-ᵣᵢgₕₜ 之間的區域,如圖 31 所示。
[0194] 由線 L11 與 L12 之間夾角限定的前額相機 2302 的豎直 FoV1(或 FoV1 的豎直份量)約為 60°,其視線中心相對於冠狀面 PF 向前偏轉約 61°。如圖 30 所示,FoV1 與前軀幹感測器元件 2208.2 的 FoV3 相互重疊,後者在 L31 與 L32 之間約為 85°,並具有相對於冠狀面 PF 向前偏轉約 45° 的視線 L30。即使沒有下巴感測器元件 304a、304b,這種重疊也確保了對機器人 2001 前方區域的全面覆蓋。進一步地,設定在頭部後側的後向相機 2305 的 FoV2 在 L21 與 L22 之間覆蓋約 20°,其上邊界相對於冠狀面 PF 約為 70°。而後向軀幹感測器元件 2208.4 的豎直 FoV4(或 FoV4 的豎直份量)在 L41 與 L42 之間約為 85°,並且其視線相對於冠狀面 PF 向後偏轉約 68°。線 L22 與 L41 的相交表明,FoV2 與 FoV4 發生重疊,從而有效擴展了後向豎直視場,並提升整體安全性和導航能力。
[0195] 當機器人 2001 向上和向下移動頭部時,FoV₁ 和 FoV₂ 都會上下移動。例如,當機器人 2001 的頭部 2010 圍繞頭部點頭(yes)軸 2010.2 向上移動時,FoV₁ 將向上旋轉到線 L₁₁-up 和 L₁₂-up 之間的區域;或者當頭部 10 圍繞頭部點頭軸 2010.2 向下移動時,向下旋轉到線 L₁₁-down 和 L₁₂-down 之間的區域,如圖 30 所示。同樣,當頭部圍繞頭部點頭軸 2010.2 向上移動時,FoV₂ 將向下旋轉到線 L₂₁-up 和 L₂₂-up 之間的區域;或者當頭部圍繞頭部點頭軸 2010.2 向下移動時,向上旋轉到線 L₂₁-down 和 L₂₂-down 之間的區域。換句話說,冠狀面 PF 與 FoV₁ 和 FoV₂ 之間的角度被設計為當機器人 2001 移動其頭部 2010 時發生變化。
[0196] 與第一實施例不同,第二實施例省略了下巴下方的頭部相機 304a、304b,而是依靠前額相機 2302 和前軀幹感測器 2208.2 進行前方感知。在第二實施例中引入了後頭部相機 2305,為機器人 2001 提供了增強的後視能力。例如,如圖 30 所示,前額相機 2302 的 FoV₁ 和前軀幹感測器 2208.2 的 FoV₃ 輕微重疊。與第一實施例(圖 17)相比,省略下巴相機 304 導致下部垂直視場中的重疊視場顯著減少。另一方面,包含後頭部相機 2305 及其 FoV₂ 可以通過提供與後軀幹感測器 2208.4 的 FoV₄ 有價值的重疊資訊(關於機器人 2001 後方的環境)來補償這種減少。
[0197] 在第二實施例中省略下頭部或下巴相機 304 提供了幾個優勢。首先,它簡化了頭部結構,減少了因頻繁轉頭引起的機械磨損。其次,感測器數量的減少減少了需要處理和分析的資料量,從而提高了能源效率和響應時間。此外,對於後視,機器人 2001 使用後頭部感測器瞄準視場可能比使用後軀幹感測器容易得多。此外,來自後頭部相機 2305 和後軀幹的組合垂直視場 (AI工業)