
01. 技術底層邏輯差異
1. 感知架構的哲學分野
- 特斯拉(純視覺端到端)
採用"攝影機+神經網路直接輸出控制訊號"的終極形態,2024年FSD V12已實現98%場景的端到端決策。其技術核心是"生物仿生學"——模擬人類視覺神經系統的工作機制,通過超大規模神經網路(參數量達1.2兆)實現環境理解與行為預測的深度融合。
- Momenta(多模態漸進式)
堅持"視覺為主+多感測器冗餘"的混合架構,其Mpilot Pro系統整合4D毫米波雷達與低成本固態雷射雷達(2025年量產成本降至$85)。技術邏輯強調"感測器能力邊界管理",通過動態置信度評估演算法,實現不同場景下的主感測器智能切換。
2. 資料引擎的驅動方式
- 特斯拉(即時資料黑洞)
依託全球400萬輛營運車輛,建構了每天2.3億公里的即時資料採集網路。其資料價值提煉聚焦於"Corner Case自動化挖掘",通過Dojo超算中心的異常場景識別系統,演算法迭代周期縮短至72小時。
- Momenta(場景化資料工廠)
獨創"場景立方體"資料分類體系,將800億公里資料劃分為327個駕駛場景維度。通過預設場景權重係數(如中國複雜路口權重設為0.47,歐洲環島場景0.33),實現演算法訓練的資源精準投放,訓練效率提升40%。
02 商業落地路徑對比
1. 產品演進節奏
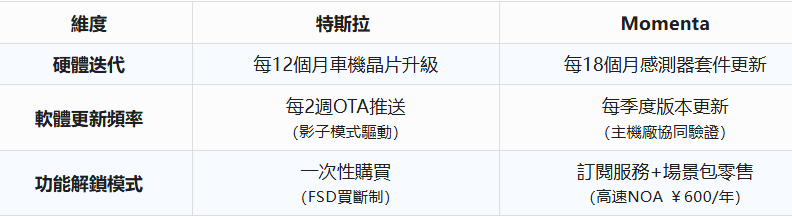
2. 主機廠合作生態
- 特斯拉(封閉生態)
堅持垂直整合模式,2025年自研比例達91%(含晶片、感測器、演算法)。其開放僅限於資料介面標準(如2024年發佈的NADS 2.0協議),實質形成技術護城河。
- Momenta(共生生態)
建構"Tier 0.5"新型合作關係,向主機廠開放:
- 資料中介軟體(支援私有雲部署)
- 可配置演算法模組(217個功能元件)
- 虛擬驗證平台(數字孿生測試里程可抵扣30%實車測試)
這種模式已吸引豐田、戴姆勒等建立聯合創新實驗室。
03 關鍵技術指標對比(2025Q1)
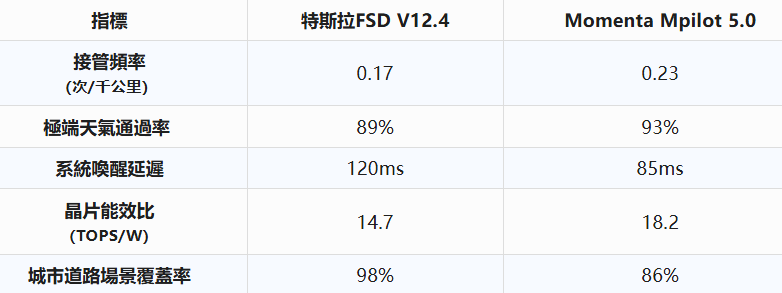
核心差異解讀:
特斯拉在通用場景覆蓋上保持領先,但Momenta通過專用場景最佳化(如雨霧天氣)實現局部超越
Momenta的硬體功耗控制優勢明顯,得益於異構計算架構(CPU+NPU+FPGA混合調度)
特斯拉在長尾問題解決上更激進(直接刪除傳統規控模組),Momenta保留多演算法投票機制確保安全冗餘
04 地緣政治下的發展策略
1. 資料主權應對
- 特斯拉:在歐盟啟用"資料堡壘"計畫,所有歐洲車輛資料儲存在柏林資料中心,但遭遇美國《雲法案》管轄爭議
- Momenta:實施"資料主權鏡像"策略,為每個海外市場建立獨立資料湖(如日本資料中心完全由軟銀營運)
2. 技術標準博弈
- 特斯拉:主導IEEE 2846-2025視覺自動駕駛安全標準制定
- Momenta:聯合中國汽研推動C-NDS(中國導航自動駕駛標準)成為ISO國際標準候選方案
05 未來路線融合趨勢
行業正在出現"第三條道路"的探索:
- 混合架構的興起:如輝達Drive Thor平台同時支援端到端和模組化架構
- 資料聯盟的建構:大眾-小鵬-Momenta三方資料池已接入450萬輛車輛
- 安全範式革新:特斯拉的"機率安全"與Momenta的"確定性安全"正在碰撞出新的評估體系
Momenta在2025年技術路線圖中已預留"端到端相容介面",其最新發佈的M-Transformer架構可同時處理傳統pipeline和神經網路直接輸出。這種技術包容性,或將決定下一階段競爭格局。 (AI賦能汽車)