
先上跑道,再進小區。
鏡識科技彷彿人形機器人行業裡的"反共識之王"。
這家2024年5月成立的公司,在不到兩年的時間裡,做了一連串與行業主流截然相反的選擇——
別人已經在追求讓機器人變聰明,他們卻專注於讓機器人跑得快;
小人形受資本偏愛又出貨快,但他們偏要做全尺寸;
明知選VLA(視覺-語言-動作模型)路線能更好融資,也更指向終局,但他們選遙操作;
別人擠著要送機器人進工廠和家庭,但他們卻想把機器人先送上賽道——真正意義上的那種體育賽道。
而這些反共識選擇的結果,目前看來,還挺炸裂的。
2025年11月,鏡識旗下四足機器人黑豹Ⅱ代受邀與巴黎奧運會百米冠軍諾亞·萊爾斯賽跑,在50米的賽道上,萊爾斯幾乎是被黑豹攆著屁股衝過了終點線。"再多10米,黑豹就可以贏過(萊爾斯)",鏡識科技的聯合創始人兼CTO金永斌說。這段人與機器狗短跑大戰的視訊在全網已有過億次播放。
僅一個月後,黑豹Ⅱ代的速度就從比賽時的11m/s左右提升到了13.4m/s,打破波士頓動力塵封12年的四足機器人奔跑速度的世界記錄——比偷偷解除限速後的新國標電動車的最高時速(40km/h左右)還要快。
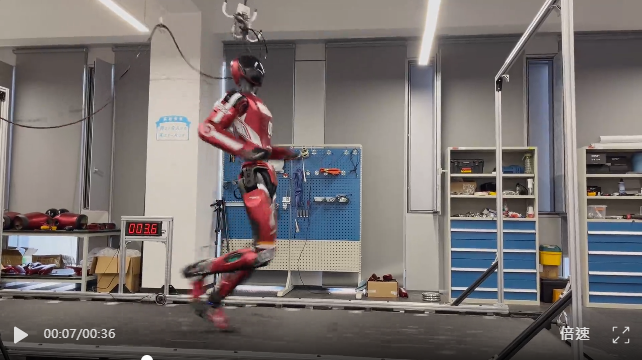
2026年2月,鏡識又發佈了首款全尺寸人形機器人Bolt,身高175cm,重75kg,在跑步機上的峰值速度可達10m/s,為當前世界上速度最快的全尺寸人形機器人。
這顯然引起了行業內的關注,就在3月17日的亞布力論壇上,宇樹創始人王興興還提到年中會有人形機器人百米將跑進10秒,核心論據就是Bolt的成績。
按照當下人形機器人最主要的兩大流派去劃分,這類跑得快性能好的機器人一般都長得不夠好看——多數關節膨大,電機外露,很不像人;而另一類像人的,性能與人類相比仍然存在差距。
但鏡識這款Bolt算是功能性較好的機器人裡,身體結構最像人的一個。整體線條流暢,沒有額外元器件外露,腳也是被認真設計過的,有一個明顯可彎折的腳掌,而非一塊需要穿鞋減輕摩擦的直板。按照金永斌的解釋,多加的這一個自由度,能在機器人高速奔跑下緩解衝擊的同時獲得更高的力量。
在同行多數都在卷機器人"腦子"的時候,鏡識在卷"身體"。
按照金永斌的判斷,隨著AI演算法的進步,機器人的控制能力已經逼近硬體本身的極限,真正卡脖子的不是腦子不夠聰明,而是機器人的身體不夠好用。
1995年出生的金永斌從本科起就在浙大學力學,2017年讀博後便開始研究高速足式機器人。
“10年前開始研究機器人時,他們就說為何要資助你們?那麼多經費研究一個機器人表現還不如一條獵犬。”這是紮在金永斌心底一個最原始的困惑,“人類的肌肉功率密度大概是300W/kg,而電機可以達到3000W/kg甚至更高,比生物性能好一個量級,但整體表現出來機器人的性能都不如生物。”
所以金永斌的解法是,用速度將硬體能力拉到極限,以最高效的暴露方式去修正機械的短板。以至於讓機器人的物理能力配得上它未來要承載的智能。
正如王興興所說,“這種物理極限的突破不僅是速度的展示,更是機器人硬體性能和控制演算法成熟的標誌。”
2023年起,金永斌發現機器人正在逐漸落地於各行業,且越來越多的開源演算法與硬體,在迅速追平他們在實驗室中的技術優勢。於是在次年5月,他與自己的老師、浙大交叉力學中心執行主任王宏濤聯合創立鏡識科技,專注於AI賦能高機動足式機器人運動研發。
一個徹頭徹尾的學院派創始團隊,若按照去年10月出圈的那篇《抱歉,不投教授創業了》中的創投圈觀點,這類創始人已經不受資本青睞了。他們最大的問題就是不愛商業化——痴迷技術、忽視市場,從實驗室到貨架的路永遠走不完。
但鏡識沿途下的蛋可能比很多人想的要多。追求極限速度過程中磨出來的驅動技術,已經下放到工業四足機器人阿波羅上——能扛70kg、跑8m/s,拿了吉尼斯紀錄,已經在賣了。還有一款帶螢幕能當智能音箱的輪足雙形態機器狗已經可以量產,在剛剛過去的AWE上正式對外發售。
我們不確定鏡識的路線最終能否跑通,但在一條同質化越來越嚴重的賽道上,一個完全不同的回答,至少值得被認真聽一次。以下是2月中旬"未來人類實驗室"與金永斌的對話,經整理髮布——
快,不只是速度
未來:為什麼一定要跑得快?
金永斌:快遠不只是速度,快是力度、密度、強度、流暢度等等一系列能力的綜合。
我們買車的時候通常會關心百公里加速時間,時間越短,車的結構越好,發動機能力越強。機器人也是,當有一個環節是薄弱的,它就會影響到最大速度的提升。
Fast在古日耳曼語裡最早的意思是“牢固”,因為你牢牢地不受阻擋,自然就快了。我們追求的是硬體牢不可破,快只是一個結果。
我們的定位是機器人裡的F1。
F1賽車本身追求的速度對普通老百姓沒什麼用,但它積累的技術可以幫助民用車變得越來越好用,像氣動佈局最佳化、主動懸掛技術,都是從F1裡演變過來的。
我們也希望做同樣的事情,以它為基礎,把機器人不如人的地方給提上去,讓它真正可以成為一個能夠走入家庭的助手。
未來:但現在大家已經不怎麼關心速度了,大家覺得機器人應該更智能化。
金永斌:像汽車,早期大家追求安全性、可靠性,現在這些已經成為默認選項了,人們越來越追求內飾、娛樂屬性。機器人也是。
但要發展智能化得有大量機器人去積累資料,前提是機器人得真正能用,我覺得還差臨門一腳。
2022年有一個全球性的阿凡達機器人比賽,我們統計過那個比賽裡最高的遙操作效率只有人類的10%。它的性能跟人類相比差太遠了,讓一個動作慢悠悠的機器人去家裡幹活,鬧心。
我們想把它外特性提升到跟人一致,或者說達到人類的80%,那就舒服多了。
現在表現比較好的、動起來比較靈活的機器人,普遍都是小尺寸的,1米3左右。因為尺寸小,它對物理的要求就低了很多,電機散熱等一系列問題會小很多。
未來:2月份你們剛發佈了一款全尺寸人形機器人,跑步機上顯示的峰值速度是10m/s,已經是當前世界上最快的人形了,還不夠嗎?
金永斌:10m/s差不多是國家二級運動員的百米速度,它還不具備為專業的運動員提供跑步服務的能力。前期我們希望它去做競技體育、陪跑,後期通過技術沉澱,再把它能夠轉移到我們家庭裡面去。
所以我們還在提升性能,爭取讓它達到一級甚至國際健將的水平。
未來:你給它設定的終極速度目標是多少?
金永斌:在戶外場景下比過博爾特(峰值是12.4m/s,100米跑9秒58),那麼人形就徹底不會再研究它速度方向了。
我們目的是復刻人類的運動行為,這樣誰都能跟博爾特比一下,還是挺刺激的對吧?
未來:你剛才說現在表現比較好的都是小人形,那你們為什麼不做?
金永斌:小人形現在機器人行業已經很多了,我們去做永遠會落後一步。
2025年初做發展計畫的時候,我說我們一定要做全尺寸的人形,它是有挑戰有難度,需要我們去攻破的。
我們目前希望機器人的技術可以得到沉澱,挖掘一些更潛在的技術壁壘。
未來:那會拖慢你的商業化吧。
金永斌:但機器人如果沒有自身特色,它商業化也會很受限。而且我們已經有工業四足機器人和消費級的輪足雙形態機器人在賣了。
我一直在思考,小人形這麼多,比如做個表演,為什麼別人要找我們,而不是找一個更成熟的、跳了很多舞的公司呢?
但大人形不一樣。從2025年10月開始,行業裡陸續有一批全尺寸人形出來,我們趕在了這一波。我們又有自己的特色,速度甚至比其他機器人快2到3倍,我們可以在自己的專屬領域先打出一片天地來。
跑那麼快有啥用?
未來:機器人裡的F1。你們這個路線受到過質疑嗎?
金永斌:有的。最開始我一介紹完我們機器人是目前跑得最快的,所有人緊接就是一句,跑那麼快有啥用?我核心再怎麼強大也扛不住。
它只要達到上界,跟速度相關的事情都能幹。事實上是有一些客戶希望有一款極速的機器人,在特殊場景下做迅速的響應。只是目前我們不直接去做這塊內容。
未來:陪跑這個場景你們是怎麼找到的?
金永斌:去年10月,通過黑豹與專業運動員比試的過程中逐漸注意到的。運動員好像都這樣,你稍微逼一逼,他馬上潛力能再上一點。
如果人形機器人的性能可以超越人類,我可以讓它成為一個速度播放器,去復刻萊爾斯、博爾特、蘇炳添一系列頂級運動員的運動過程,借此來訓練我們中國的運動員。
我們很有幸能夠跟萊爾斯去比一下,但並不是所有的運動健兒都有機會的,博爾特、蘇炳添都退役了,但是借助我們的機器人是可以的。
我們希望在26年能夠打開這個新的賽道,普通的學校和大眾陪跑都可以用,還可以向其他田徑領域延伸,跳高、跳遠……目前來講沒有任何的機器人公司做過。還是挺值得的。
未來:陪跑的控制演算法不需要通用人工智慧嗎?
金永斌:是的。
我們可以把博爾特這些世界名將的跑步行為編成一個個小程序,設定好,一鍵播放就好了。這種固化下來的任務對於當前的技術都不難,它考驗的是硬體的能力極限。反而生活中端茶倒水整理桌子這種場景越豐富的任務對機器人來說越難。
未來:為什麼一定要走遙操作這條路線?行業內更主流或者說更追求的貌似是VLA。
金永斌:說實話,如果我們宣佈做VLA,融資可能更順利。但我覺得完全靠人工智慧控制機器,它道路還比較遠。
自動駕駛到現在20多年了,而且積累了海量資料,L4目前都沒有完全開放。機器人的自由度更多,更難控制,資料還極度匱乏。
資料採集方面存在一個悖論——機器人不落地就沒有真實資料,沒有資料就訓不出好的控製器,就更沒法落地。
而遙操作可以打破這個死循環:讓人先控制機器人去幹活,在真實環境裡積累資料,技能逐步固化。最開始可能每件事都要人手把手教,但越往後,機器人的技能越來越像App——比如洗碗,給一萬個家庭洗完碗之後,資料沉澱下來就形成一個洗碗的專項動作庫,以後遙操作人員點一下"洗碗",它就自動開始了。
真正有實力做出完全智能體的公司,一定比我一個力學出身的團隊做VLA專業得多。與其在不擅長的方向上分散資源,不如把自己擅長的點做到極致,等他們的演算法成熟了,剩下的就是融合問題。
未來:你提到在之前一個國際性的機器人大賽中,當時機器人的遙操作效率只有人類的10%,你們現在能達到多少?
金永斌:我們當時自己發展了一套遙操作控制演算法——讓機器人保留一定的自主控制權限,同時配合人的控制意圖,但即便這種很複雜的演算法也只能把效率提升到20%左右。
後來我們通過建模發現,最大的瓶頸不在演算法,而在硬體的響應能力。相當於你讓一個F1賽車手去開面包車,他車技再好也開不出好成績。所以我們現在就是為這個車手打造一輛真正的賽車。等硬體的能力包絡面超過人類之後,再把演算法結合進去,才有可能真正達到甚至超越人類的效率。
未來:你覺得全自主的機器人真正進入家庭還要多久?遙操作呢?
金永斌:全自主的話,大概需要10年。但遙操作進入家庭,5年內就可以完成。
未來:有沒有可能VLA的發展速度會快於你的預期,直接超越遙操作?
金永斌:有可能。但我覺得遙操作是VLA真正爆發前的前站技術。
不管VLA本身發展多快,它都需要一個前提——大量真實可靠的資料。而遙操作是最有可能快速解決這個前提的方法。
據我所知,美國已經在執行這個策略了,有些機器人通過遙操作讓越南、菲律賓的人員遠端控制,一邊幹活一邊產生資料。
未來:按照你這個設想,遙操作進入家庭之後會是什麼樣子?它會變成一種什麼樣的服務形態?
金永斌:可以成為家政公司的一種延伸形態。未來的家政服務不一定是阿姨上門,而是遠端操作員通過機器人幫你做家務。
早期大機率不是家家戶戶買一台機器人,而是在小區裡租賃——就像共享行動電源一樣,小區部署幾台,住戶按需預約。你今天要做大掃除,預約一台,遠端操作員接入幫你幹完活,機器人回到充電樁待命。單台利用率拉滿,使用者不用承擔整機購買成本。
隨著技能庫越來越豐富,操作員的人均服務戶數也越來越高,整個模型就跑通了。
而且它還可能催生一種全新的"交通方式"——不是人的遷移,而是智力的遷移。
比如一些工廠集中的地方,白天8小時中國的工人接入操控,再過8小時中東的人接進來,再過8小時南美洲的工人接進來——一個工廠24小時運轉,不需要任何人力的實際遷移,只需要把智力遷移過來,通過機器人實體去執行。
像人,不是選擇題
未來:你說的這些任務更多是對功能性的要求,那是否有必要讓機器人像人?你之前提到過在設計這款人形時幾何約束是很嚴格的。
金永斌:"像人"是人類對機器人的一個本能訴求。
縱觀整個行業,長得好看的機器人,性能相對差,性能好的就更偏科幻風,"鋼鐵巨獸"那種。怎麼在兩大派技術路線之間做一個融合,好像不是有特別多團隊去考慮這件事,但我個人不是很能接受這種狀態。所以從一開始就想:有沒有可能既美觀,同時還能夠性能很強?有一點自己的技術潔癖。
我們在設計之初就把幾何尺寸卡得很死,所有關節必須放在人體的幾何約束下,不能有膨大突出的部分。外觀是約束,是嚴格不能打破的;性能是最佳化目標,在約束條件下儘可能提升。
未來:長得像人跟性能好之間的主要矛盾是什麼?
金永斌:剛才說的兩大流派——像人的都是直線電機,傳動是非線性的,性能受限;另一派用旋轉式關節,控制性好很多,做前後空翻的基本都是這種,但都有圓鼓鼓的電機鼓出來,因為它們的電機都是橫著放的。但人的小腿橫截面很小,他們就糾結了:到底是讓它美觀還是讓它能力變強?
未來:那你們是怎麼做到的?
金永斌:(Bolt)這款人形發佈後,很多人奇怪為什麼那麼細的腿能夠跑出那麼高的速度。
我們設計了一種全新的傳動方式——把電機軸和關節軸設計成垂直的,中間通過一個90度換向結構來傳動。這樣可以充分利用腿部狹長的結構空間,把電機藏進腿的內部。
想讓機器人性能好,電機就得大。我們就在限定的空間裡讓電機放得儘可能大,讓關節擁有更大的功率。功率大了之後,速度、爆發力、負載能力,都能滿足。這套傳動方案是通用的。
未來:這個技術很難實現嗎?為什麼行業裡一直沒人做?
金永斌:在技術上不是特別難實現。我也不知道為什麼,可能大家進入了某種思維定式。
也跟需求有關。追求性能的允許機器人長得不像人;有硬性約束要求像人的,就接受性能變差。
我們也是靈光一現,冒了很大風險,據我所知的公司方案裡面,就我們採用這種傳動方式。
未來:之前提到說在做硬體設計時要靠大量工程迭代,時間和金錢成本都很高,你所謂整個人形機器人行業缺一個正向設計軟體,是指什麼?
金永斌:一個系統性的完整的機器人建模最佳化工具。
機器人自由度太高,受力行為又完全不一樣,沒有統一的框架去刻畫整台機器人的運動行為,大家只能靠經驗和反覆迭代。但痛苦的是,性能不好到底怪硬體還是怪演算法?說不清楚。而這樣做時間和金錢成本都很高。行業同質化也越來越嚴重。
我就想有沒有可能讓一台機器人的能力上限,在它被造出來之前、演算法被寫出來之前,就先確定下來?
所以我們自己先做了一套軟體,比如我告訴它我想跑到10m/s,我有重量約束、高度約束……它告訴我那個關節該怎麼選型,胳膊多長、腿多長、身體該多重,然後我們再基於這些參數去設計,就不用再靠大量工程迭代。
就像晶片行業有ARM的IP架構,汽車行業有成熟的CAE模擬鏈——你有什麼需求,按範本選配就行,不用每家從零開始。
未來:你們這套軟體也可以拆出來賣啊。
金永斌:有考慮過,但我們人力有限,短期內先把我們自己的機器人打磨好,再把這個東西給變成一項服務也好,提供給別人。
想證明這個軟體是好的,得我們自己的機器人本身足夠好才行,不然憑啥你們相信我的軟體是好的,對吧? (36氪)