
數十億年來,生物體為了延續生命,已經進化出多種繁衍方式。 近日,美國佛蒙特大學和塔夫茨大學的研究團隊發現了一種全新的生物繁殖方式,並利用這一發現創造了有史以來第一個可自我繁殖的活體機器人——Xenobots 3.0,未來或可為外傷、先天缺陷、癌症、衰老等提供更直接、更個性化的藥物治療。 研究結果發表在29日《美國國家科學院院刊》上。
去年,該研究團隊用非洲爪蟾早期胚胎中的皮膚和心臟細胞組裝成一種全新的生命形式,創造出全球首個活體機器人"Xenobots(異種機器人)"。 它們可在耗盡能量之前獨立移動約一周,同時可自我修復並自然分解。 今年3月,Xenobots 2.0活體機器人問世,其能夠使用像頭髮一樣的纖毛"腿"自行推進,在一個表面上快速移動。 此外,它還有記錄資訊的能力。
此次全新升級的Xenobots 3.0僅有毫米寬度,既不是傳統的機器人,也不是一種動物,而是活的、可程式設計的有機體。
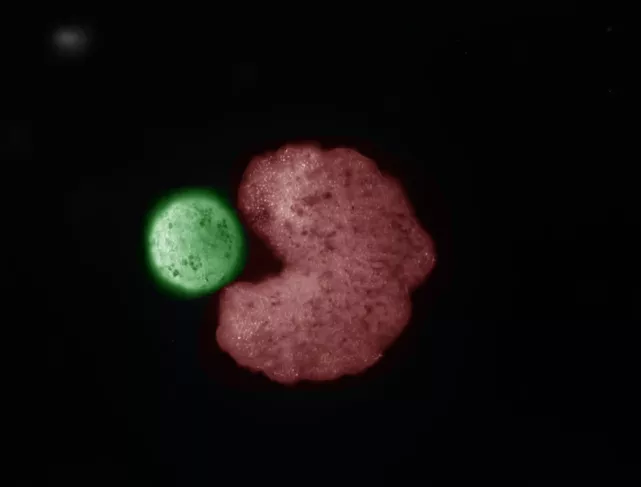
研究人員發現,如果將足夠多的異種機器人放置在培養皿中彼此靠近,它們會聚集並開始將其他漂浮在溶液中的單個幹細胞堆疊起來。 於是,多達數百個幹細胞在它們如同吃豆人形狀的"嘴"中組裝了"嬰兒"異種機器人。 幾天後,這些「嬰兒」就會變成外觀和動作都跟母體一樣的新異種機器人。 然後這些新的Xenobots可再次出去尋找細胞,並建立自己的"副本",就這樣周而復始,不斷複製。
該研究主要作者、美國佛蒙特大學計算機科學和機器人學教授喬什·邦加德說,異種機器人最初是球形的,由大約3000個細胞組成。 分子水準上的動力學複製是眾所周知的,但以前從未在整個細胞或生物體的水平上觀察到過,而此次Xenobots 3.0的複製正是運用了這一機制。

邦加德介紹說,為了讓異種機器人在此類複製中更有效,研究人員利用人工智慧技術測試了數十億種體型,最終塑造出類似吃豆人一樣的C形狀,這種形狀能夠在培養皿中找到微小的幹細胞,聚集並完成複製。
雖然自我繁殖的生物技術用途令人擔憂,但研究人員表示,這些機器人完全被封裝在實驗室中,是可生物降解的,很容易被消滅,並經過了美國聯邦、州和機構各級倫理專家的審查。
邦加德表示,這種分子生物學和人工智慧技術結合的成果或可用於人體和環境中的許多任務,例如收集海洋中的微塑膠、檢查根系和再生醫學等。
全球首次! 活體機器人「生娃」
本來,非洲爪蟾蛙的這些胚胎細胞會發育成皮膚。 但它會擋在蝌蚪的外面,阻擋病原體並重新分配粘液。
研究人員這次將這些胚胎細胞置於一個新的環境下,讓其有機會重新利用這個「多細胞性」。
這次,這些胚胎細胞要發育的目標和皮膚大不相同。
「這些青蛙細胞的複製方式與以往大不相同。 科學上已知的任何動植物都不會以這種方式複製」,這項新研究的主要作者 Sam Kriegman 博士說。
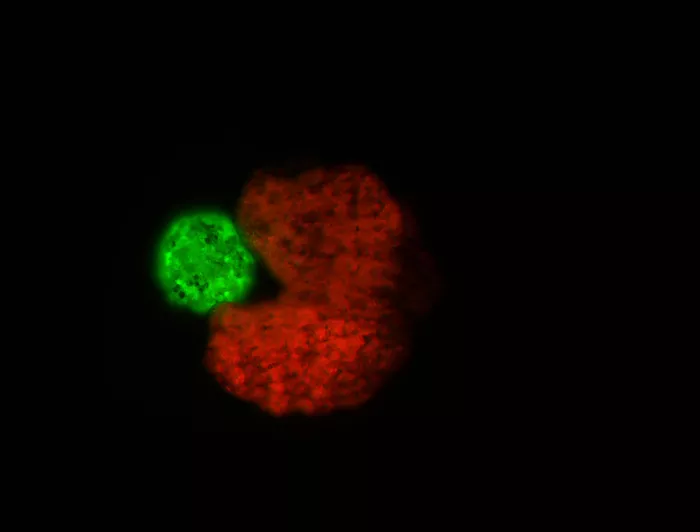
最初,由大約 3000 個細胞組成的爪蟾機器人(Xenobot)親本形成了一個球體。 大約 3 天後,球體外表面上會形成纖毛。
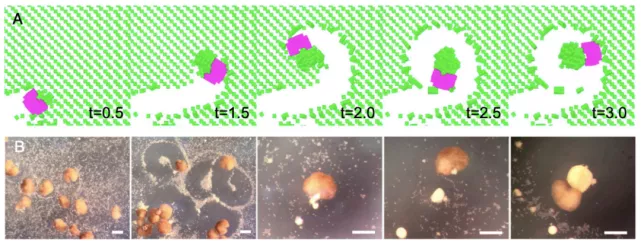
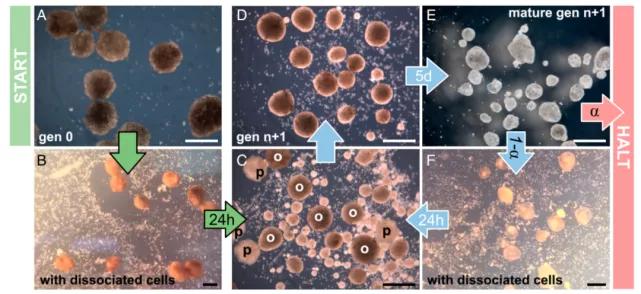
當產生的成熟細胞群處於培養皿中約 60000 個分離的幹細胞中時,它們的集體運動將一些細胞推到一堆。
如果這個「堆」足夠大,這些細胞群就能發育成會游泳、帶纖毛的後代。 如果分離幹細胞更多,則會產生更多的後代。
不過,這個複製過程最多持續兩輪。 是否會停止取決於適合青蛙胚胎發育的溫度範圍、解離細胞的濃度、成熟生物的數量和隨機行為、溶液的粘度、培養皿的幾何形狀表面,以及污染的可能性。
確實,就像研究論文作者之一Sam Kriegman博士所說:「這些機器人可以生孩子,但之後這個複製系統很快就會消亡。 要讓系統繼續複製非常困難」。
看來,球體結構不利於機器人的生殖系統的複製,怎麼辦? 試試別的形狀!
這正是AI入場的好時候。
通過 Deep Green 超級電腦集群上運行的AI程式,進化演算法在類比中對數十億種形狀進行了測試——三角形、正方形、金字塔、海星形——讓細胞在複製中的效率更高。
研究人員使用一種進化演算法,從隨機群開始,進化出具有增加自我複製能力的細胞群。 ( FG = 給定群體實現的子代數。 小數部分表示群體距離實現另一輪複製的距離。 )
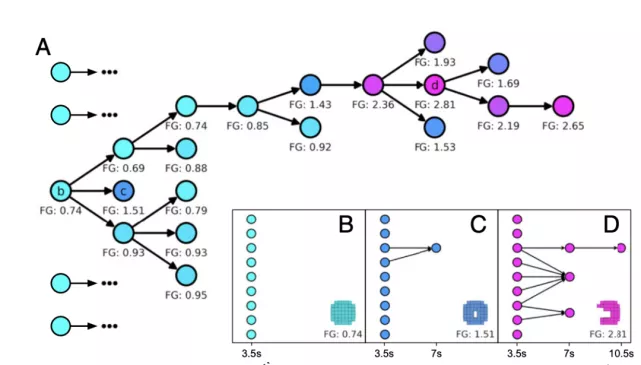
這個進化試驗中最成功的世系起源於一個球體,它構建的樁不超過 74% 自我複製所需的大小閾值。
爪蟾機器人(Xenobot)能夠在培養皿中找到微小的幹細胞並將數百個幹細胞聚集在「嘴」(指C型的缺口) 里,幾天后這組幹細胞就會裂變成新的爪蟾機器人。
「我們利用超算弄清楚了如何調整最初父母親本的形狀。 經過幾個月努力,AI想出了一些奇怪的設計,包括一個類似於「吃豆人」的形狀。 這種設計相當違反直覺,它看起來很簡單,但人類工程師想不出來。」 Sam Kriegman說。
比如,為什麼是一張嘴? 為什麼不是5張嘴? 不過,形狀雖然看起來有點奇怪,但效果很好。 經測試,這個「吃豆人」形狀大大延長了Xenobot 機器人複製系統的壽命。
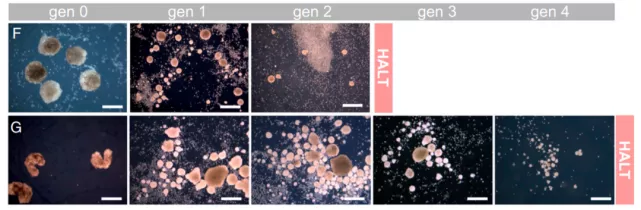
實驗表明,在經歷AI演算法篩選出的「吃豆人」形狀下,機器人的自我複製系統壽命,由最多2代增加到了4代。
現在,這些機器人的兒子能生孫子,孫子又生了曾孫,繁殖還在繼續......
眾所周知,運動學複製在分子水準上是眾所周知的,但以前從未在整個細胞或生物體的尺度上觀察到。
Douglas表示,「我們已經發現,在生命系統中存在著一個未知的空間。 我們如何去探索那個空間? 我們發現了會走路的機器人;我們發現了會游泳的機器人。 現在,我們又發現了可以運動、可以自我複製的異形機器人。 未來還會有什麼發現呢?」
誠如研究人員所說,「在生命的表面之下,還隱藏著更多令人驚訝的行為,等待我們去發現。」
機器人「生娃」,恐懼? 興奮?
美國科學家首次實現了讓活體機器人繁育,有些人可能會覺得這令人振奮。
Bongard表示,「我們正在努力理解這個屬性: 複製。 世界和技術正在迅速變化,對於整個社會而言,我們研究並理解這種現象是如何發生的,這一點非常重要。」
團隊的目標是加快人們從認識問題到給出解決方案的轉變速度,比如利用活體機器人把塑膠微粒從下水道中拉出來,或者製造新的藥物。
研究團隊看到了活體機器人朝著再生醫學發展的前景。
Levin解釋道,「如果我們知道如何告訴細胞集合做我們想讓它們做的事情,最終,那就是再生醫學,比如創傷性損傷、出生缺陷、癌症和衰老的解決方案。 這些問題的存在是因為我們不知道們不知道如何預測和控制細胞群的構建。」(綜合科技日報、騰訊科技)